
Kaisar (aka Roboticbits) has developed a tiny robot based on Pironomi Tiny 2040 Raspberry Pi RP2040 development board, which he/she claims is the smallest in the world, but it might not be depending on how one measures it.
Nevertheless, the Dot is a cool project with two wheels with a 3V DC motor attached to the 22.9 x 18.2 mm board, and a 70mA battery to power the mini robot. Here’s what it looks like in action.
Introducing Dot.. a stamp size @Raspberry_Pi #RP2040 robot.. the smallest in the world! Makes a proper use of the @pimoroni #Tiny2040!#raspberrypi #robot #robotics #make pic.twitter.com/rnYghWY6NJ
— RoboticBits (@roboticbits) November 11, 2021
Eventually, the robot should be documented on Github, but at this time we have limited information with a photo accompanying the video demo above.
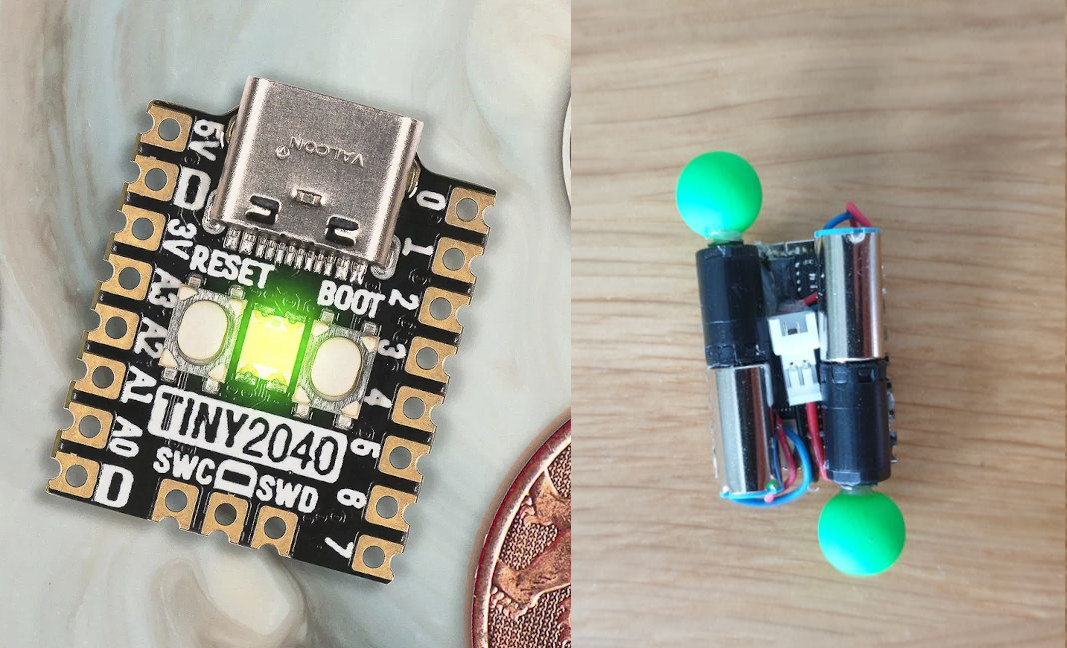
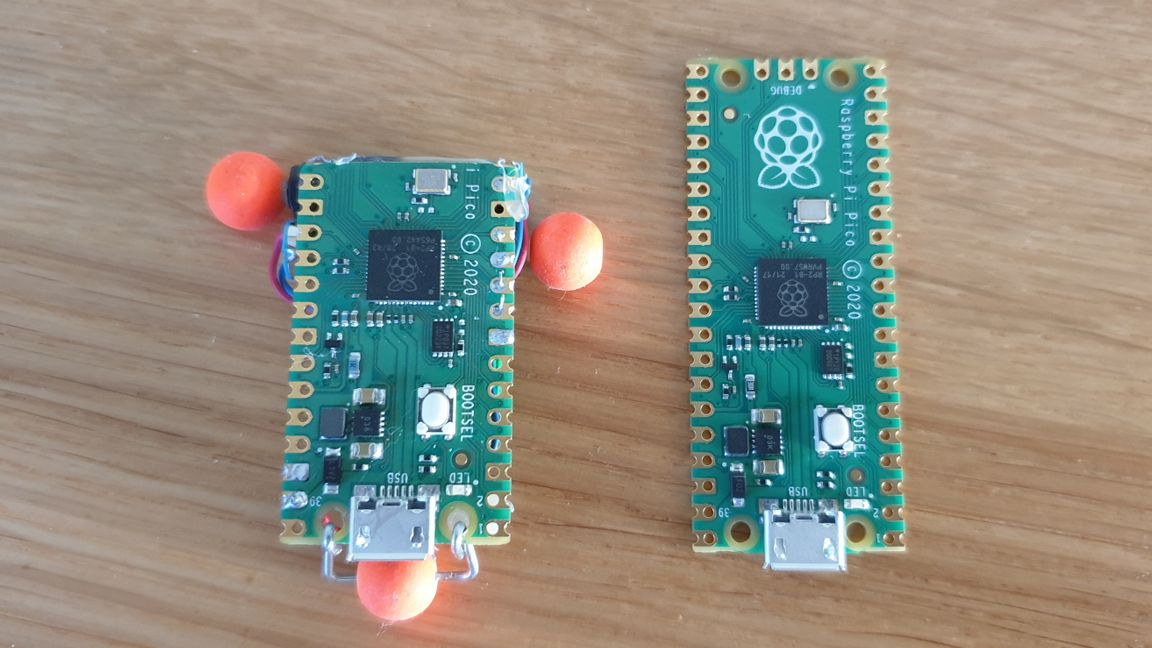
Tom’s Hardware got more details about the software as well, with Kaisar saying the firmware was developed with CircuitPython, but future code will be using C++ (or is that C?). The DC motors are apparently directly connected to the GPIOs of the board which could potentially lead to damages. One of Kaisar’s previous projects used a larger, but cut out, Raspberry Pi Pico with three motors controlled through TI DRV8833 motor driver. There may not have had enough space, or Kaisar thought it might not be necessary with the Tiny 2040 design.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress



@CNX
Yes it depends on your definition of Robot,
https://www.instructables.com/Build-a-Very-Small-Robot-Make-The-Worlds-Smalles/#discuss
This is cool, but really limited as a robot in that the MCU used there barely does more than deciding whether to drive forward or backward, which is quite similar to the capacities of various hexbugs and similar devices that are powered on LR44 batteries.
Here there is some potential for interacting with the environment (e.g. detecting light, obstacles etc) making this smarter, but for now this doesn’t seem exploited and it will inevitably come with a few more components.
Great and fun work anyway!