
The SparkFun ZED-F9R GPS pHAT module is targeted at single board computers like the Raspberry Pi, Jetson Nano, and other boards with the 2 x 20mm header form factor supporting the GPS RTK (Real-time kinematic) capable of centimeter-level accuracy.
Dead Reckoning in robotics allows one to calculate one’s position by using a previously known location or landmarks. Dead Reckoning is an essential aspect of robot navigation, especially Autonomous vehicles like mobile robots or UAVs. For dead Reckoning to be realistic and minimize the position uncertainty, it usually requires the fusion of position estimation sources like Lidar, Radar, IMU, Odometry, GNSS, accelerometer, and some others.
Sparkfun understands this and has launched the Dead Reckoning add-on module that can be used for applications in mobile robots, UAVs, and others.
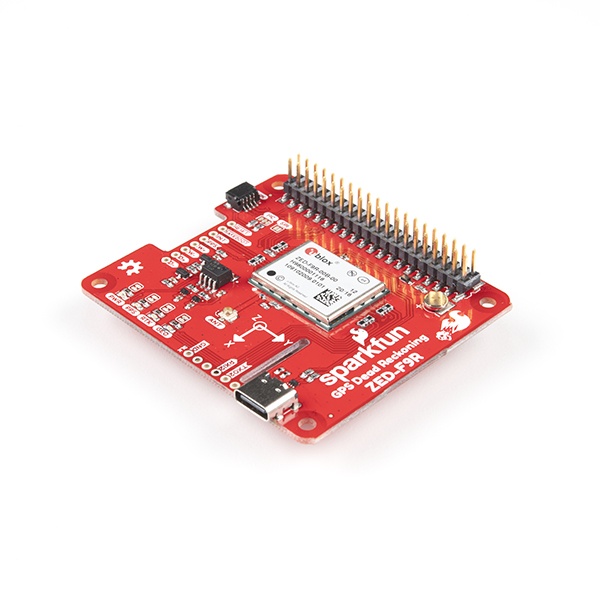
The Sparkfun ZED-F9R GPS pHAT is an exciting sensor fusion board (having been a fan of Extended Kalmar Filter) that provides accurate and real-time position update by fusing a 3D IMU sensor, wheel ticks, a vehicle dynamics model, correction data, and GNSS measurements. With an update rate of 30Hz, meaning you have a position value every 33.3ms.
The ZED-F9R GPS pHAT isn’t the first GPS RTK module for position update, and there is the tiny multi-band Skytraq PX1122R GNSS RTK module supporting major GNSS standard in a small form factor, or even the miniature SBG Systems Ellipse-D incorporating a nine-axis IMU sensor with an RTK GNSS promising up to 1 cm accuracy. According to Sparkfun:
This pHAT maximizes position accuracy in dense cities or covered areas. Even under poor signal conditions, continuous positioning is provided in urban environments and is also available during complete signal loss (e.g. short tunnels and parking garages). The ZED-F9R is the ultimate solution for autonomous robotic applications that require accurate positioning under challenging conditions.
The Sparkfun ZED-F9R GPS module is powered by the 184-channel u-blox F9 engine GNSS receiver, supporting GPS, GLONASS, Galileo, and BeiDou constellations with ~0.2-meter accuracy! Unlike similar RTK modules, the ED-F9R GPS can only operate as a rover and will need to connect to an external base station.
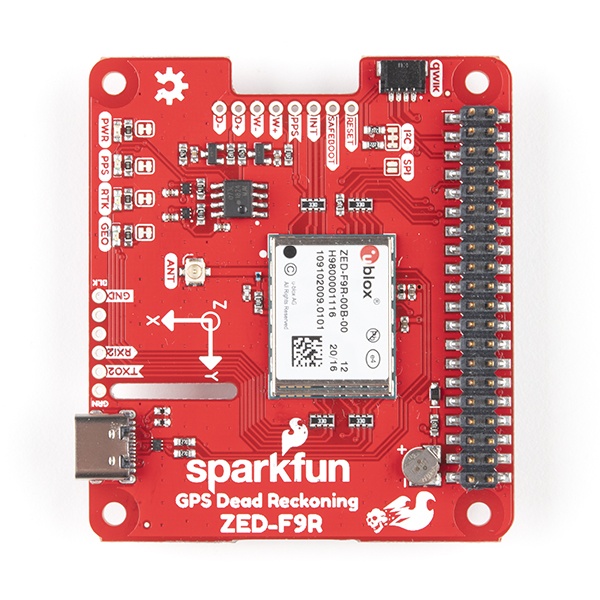
The U-blox u-center can be used for configuration of the module’s baud rates, update rates, geofencing, spoofing detection, external interrupts, SBAS/D-GPS, etc. The ZED-F9R module incorporates a rechargeable battery that provides power to the RTC on the module, helping reduce the time-to-first fix.
Specifications:
- Based on the U-blox ZED-F9R module.
- Onboard Sensors – Built-in IMU with accelerometer and gyroscope
- 184-channel receiver – Supports GPS, GLONASS, Galileo, and BeiDou signals.
- Multi-Band: L1C/A and L2C bands.
- Accuracy:
- Horizontal positional accuracy: 20cm with RTK
- Velocity accuracy: 0.5mps
- Heading Accuracy: 0.2 degrees
- Time pulse accuracy: 30ns
- First fix: 24 seconds cold or 2 seconds hot
- Operation Limits:
- Maximum G: Up to 4 G
- Max Altitude: 50 km / 31 miles
- Max Velocity: 500mps
- Max Navigation rate: Up to 30Hz
- Power:
- Input Voltage: 5V or 3.3V
- Current draw: ~85mA – 130mA
- UART and I2C Communication (UART only for RaspberryPi)
- Extras:
- u.FL connector
- Rechargeable battery for RTC.
The Sparkfun ZED-F9R HaT is available for purchase at $249.95 online, and it requires an antenna to function properly, which has to be purchased separately. Sparkfun has provided a Hookup Guide in setting up the device on the Raspberry Pi with a Python example code here.
Via LinuxGizmos
I enjoy writing about the latest news in the areas of embedded systems with a special focus on AI on edge, fog computing, and IoT. When not writing, I am working on some cool embedded projects or data science projects. Got a tip, freebies, launch, idea, gig, bear, hackathon (I love those), or leak? Contact me.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress


