
Parrot and Canonical have partnered to develop the Parrot S.L.A.M.dunk development kit for the design of applications for autonomous navigation, obstacle avoidance, indoor navigation and 3D mapping for drones and robots, and running both Ubuntu 14.04 and ROS operating systems. The name of the kit is derived from its “Simultaneous Localization and Mapping algorithm” (S.L.A.M) allowing for location without GPS signal.
Parrot S.L.A.M Dunk preliminary specifications:
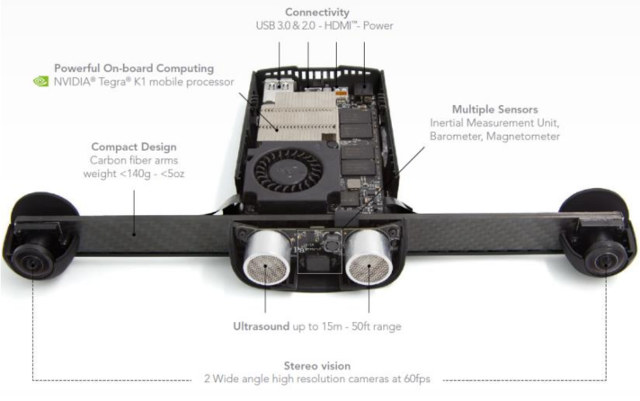
- SoC – NVIDIA Tegra K1 processor
- Camera – Fish-eye stereo camera with a 1500×1500 resolution at 60fps
- Sensors – Inertial-measurement unit (IMU), ultrasound sensor up to 15 meters range, magnetometer, barometer
- Video Output – micro HDMI
- USB – 1x micro USB 2.0 port, 1x USB 3.0/2.0 port
- Weight – 140 grams
Parrot S.L.A.M dunk can be fitted various drones and robotic platforms such as quadcopters and fixed-wings, rolling robots and articulated arms using mounting kits. The computer module is then connected to the host platform via a 3.5mm jack cable and a USB cable in order to send and receive commands and data.
 This morning I wrote about SoftKinetic 3D sensing camera based on time-of-flight technology, but Parrot S.L.A.M Dunk is based on more commonly used stereo vision cameras. The micro HDMI allows developers to connect the computer to a monitor in order to develop their application for Ubuntu and ROS.
This morning I wrote about SoftKinetic 3D sensing camera based on time-of-flight technology, but Parrot S.L.A.M Dunk is based on more commonly used stereo vision cameras. The micro HDMI allows developers to connect the computer to a monitor in order to develop their application for Ubuntu and ROS.
Parrot S.L.A.M Dunk will be available in Q4 2016 at an undisclosed price. More information should eventually be found in Parrot Developer website.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress


