
Thomas Petazzoni, embedded Linux engineer and trainer at Free Electrons, describes the steps he followed to add a new Marvell SoC to the mainline kernel at ELCE 2012.
Abstract:
Since Linus Torvalds raised warnings about the state of the ARM architecture support in the Linux kernel, a huge amount of effort and reorganization has happened in the way Linux supports ARM SoCs. From the addition of the device tree to the pinctrl subsystem, from the new clock framework to the new rules in code organization and design, the changes have been significant over the last one and half year in the Arm Linux kernel world.
Based on the speaker’s experience on getting the support for the new Marvell Armada 370 and Armada XP SoC support in the mainline Linux kernel, we will give an overview of those changes and summarize the new rules for ARM Linux support. We aim at helping developers willing to add support for new ARM SoCs in the Linux kernel by providing a check-list of things to do.
Here’s a summary of the main steps to go through to port a new SoC to ARM Linux:
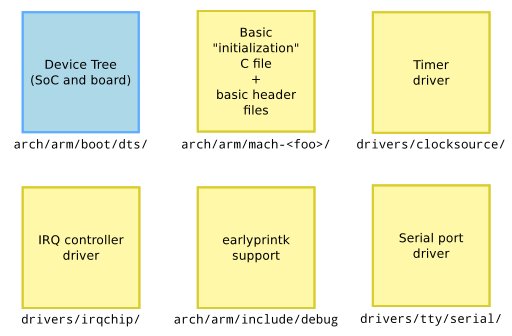
- Minimal image – Write your device tree (arch/arm/boot/dts), implement basic initialization C and header files (arch/arm/mach-foo), the timer driver (drivers/clocksource), the IRQ controller driver (drivers/irqchip), earlyprintk support (arch/am/include/debug), and the serial port driver (drivers/tty/serial)
- More core infrastructure – Add pin muxing control (drivers/pinctrl), clocks (drivers/clk), and GPIO (drivers/gpio)
- More drivers, advanced features – Add the network driver (drivers/net), SPI controller driver (drivers/spi), SMP support, SATA controller driver (drivers/ata), Power management, and other drivers.
In all the steps above, each driver must have its own device tree binding. and they cannot include <mach/something.h> anymore as they must be supported by different platforms without having to rebuild them. Device tree is now compulsory for all new SoC, and it you have old code for an existing SoC, it’s very likely you’ll have to start from scratch due to device tree and the many changes that occurred in the kernel in the last two years.
Many ARM SoCs still do not comply with the current best practices, and Thomas recommends to have a look at the following implementations to get started:
- arch/arm/mach-highbank
- arch/arm/mach-socfpga
- arch/arm/mach-bcm2835 (So having a Raspberry Pi might be a good idea to learn and experiment about device tree)
- arch/arm/mach-mxs
- arch/arm/mach-mvebu

You can also download the slides for this presentation.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress


