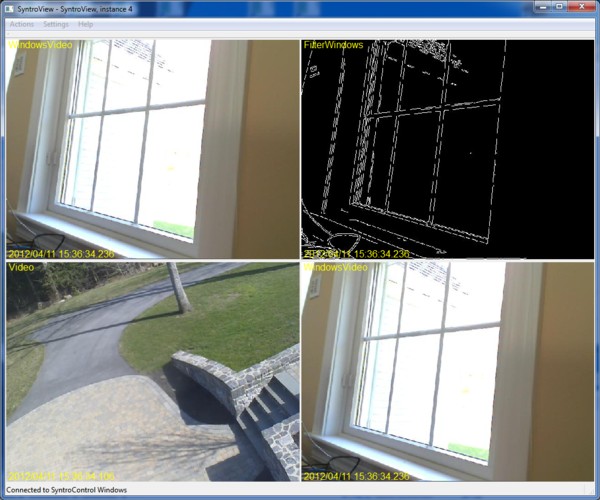
Pansenti has announced the first release of Syntro (version 0.5.0), a cross-platform framework for creating distributed sensor networks. Syntro is an open source C++ library and a set of applications based on Qt 4.7. The source code is released under the GPL license. Syntro has been developed on the following platforms: Linux Fedora 16 Ubuntu >= 10.10 Mac OS 10.7 Windows 7 Syntro can run on x86 targets as well as ARM based Pandabord, Beagleboard and Beaglebone development boards (Ubuntu only). Syntro is based on the following “SyntroCore” applications: SyntroExec – Start up and management of Syntro apps. SyntroControl – Message switching and multicast distribution. SyntroStore – Multicast stream capture. SyntroCFS – Cloud file storage. SyntroReplay – Multicast stream generation. SyntroLog – Network-wide logging. Some demo applications using one or more webcams and the OpenCV library are also available: SyntroCamera – Capture a stream from a video device (such as […]
Syntro 0.5.0 Cross-platform C++ Framework for Distributed Sensor Networks