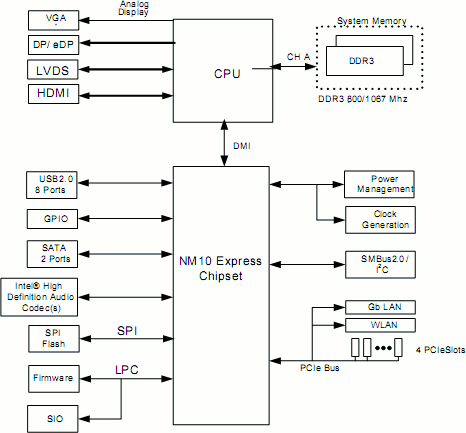
Intel recently published the Intel® Atom™ Processor D2000 Series and N2000 Series Datasheet (PDF). The D2000 and N2000 Series (Codenamed ” Cedar Trail”) includes four new CPUs targeted at Desktops (D2000 Series) and Netbooks (N2000 Series): Atom N2600 @ 1.86 GHz – Up to 2 GB memory – 42 USD Atom N2800 @ 2.13 GHz – Up to 4 GB memory – 47 USD Atom D2500 @ 2.13 GHz- Up to 4 GB memory – 42 USD Atom D2700 @ 2.40 Ghz – Up to 4G memory – 52 USD Those processors will be manufactured using 32nm technology and the D2000 series will replace the existing Atom N475 and N455. The CPUs will also feature an integrated GPU (SGXS45 PowerVR Core) that supports DirectX 10.1 technology and OpenGL 3.0. The processors will support Blu-Ray 2.0 and resolution up to 1080p (1920×1080) and even 2560×1600 for D2000 series via the DP […]
Intel Unveils Cedar Trail Atom Processors: N2600, N2800, D2500 and D2700