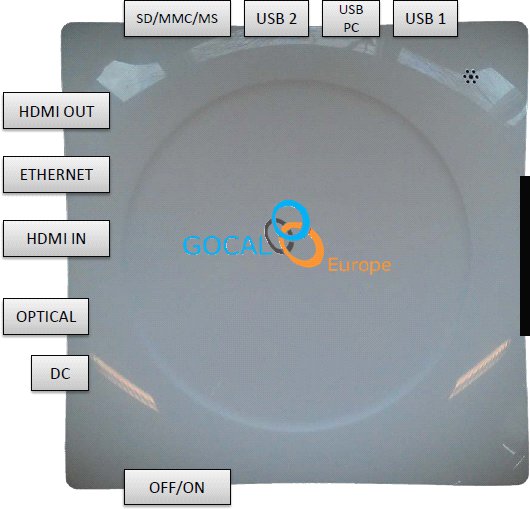
Shenzhen Tena Electronics showcased an interesting “Smart Box” that can mirror a device display (smartphone, tablet, laptop..) on a TV via Wi-Fi at the Shenzhen Electronic Fair, on 10-11 April, 2012. In the video below shot by Charbax, an HTC smartphone, running a specific Android application (apparently not available on Google Play), plays back a 720p movie which is displayed on a television via sztena’s Smart Box. It’s rather choppy, but there may be quite a lot of noise with all the WiFi signals at the exhibition. I very much like this concept, but the current retail price (999 RMB – about 160 USD) makes it unattractive to me for tasks such as video playback or checking email. However, provided it’s smooth enough, games using accelerometer and gyrometer might be fun to play. Imagine a car racing game, where your mobile phone or tablet is your steering wheel and gear […]
Shenzhen Tena Electronic Wi-Fi Display Mirroring Smart Box