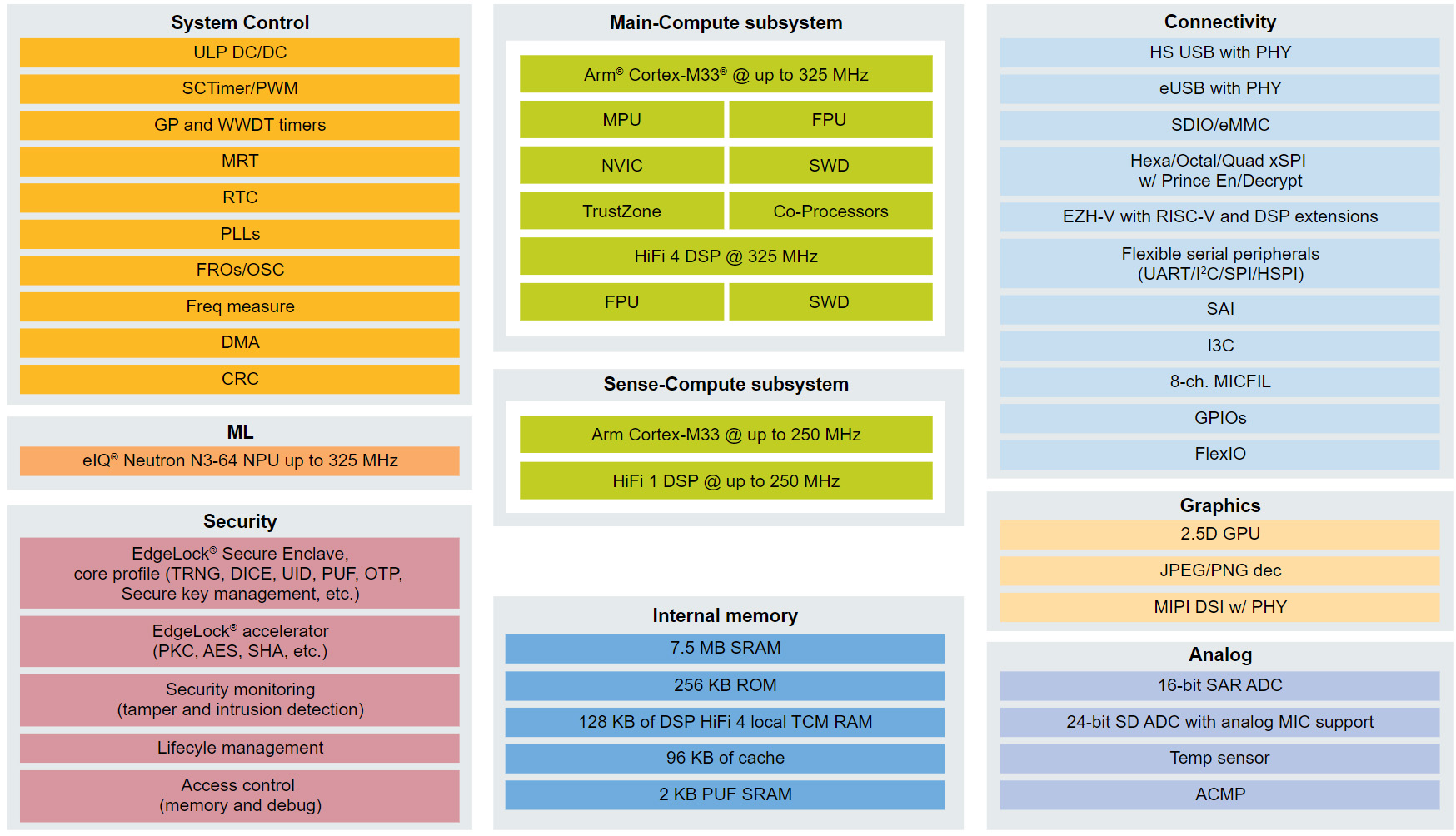
NXP has recently announced the release of NXP i.MX RT700 RT700 AI crossover MCU following the NXP i.MX RT600 series release in 2018 and the i.MX RT500 series introduction in 2021. The new i.MX RT700 Crossover MCU features two Cortex-M33 cores, a main core clocked at 325 MHz with a Tensilica HiFi 4 DSP and a secondary 250 MHz core with a low-power Tensilica HiFi 1 DSP for always-on sensing tasks. Additionally, it integrates a powerful eIQ Neutron NPU with an upgraded 7.5 MB of SRAM and a 2D GPU with a JPEG/PNG decoder. These features make this device suitable for applications including AR glasses, hearables, smartwatches, wristbands, and more. NXP i.MX RT700 specifications: Compute subsystems Main Compute Subsystem Cortex-M33 @ up to 325 MHz with Arm TrustZone, built-in Memory Protection Unit (MPU), a floating-point unit (FPU), a HiFi 4 DSP and supported by NVIC for interrupt handling and SWD […]
NXP i.MX RT700 dual-core Cortex-M33 AI Crossover MCU includes eIQ Neutron NPU and DSPs