=======================================================
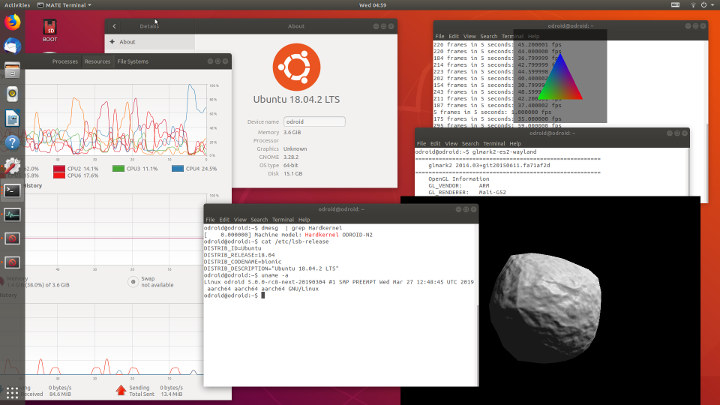
glmark2 2014.03+git20150611.fa71af2d
=======================================================
OpenGL Information
GL_VENDOR: ARM
GL_RENDERER: Mali-G52
GL_VERSION: OpenGL ES 3.2 v1.r16p0-01rel0.2943fc4ef9657d91ee32c9a58dec6cd2
=======================================================
[build] use-vbo=false: FPS: 961 FrameTime: 1.041 ms
[build] use-vbo=true: FPS: 1592 FrameTime: 0.628 ms
[texture] texture-filter=nearest: FPS: 1491 FrameTime: 0.671 ms
[texture] texture-filter=linear: FPS: 1477 FrameTime: 0.677 ms
[texture] texture-filter=mipmap: FPS: 1524 FrameTime: 0.656 ms
[shading] shading=gouraud: FPS: 1151 FrameTime: 0.869 ms
[shading] shading=blinn-phong-inf: FPS: 1215 FrameTime: 0.823 ms
[shading] shading=phong: FPS: 1043 FrameTime: 0.959 ms
[shading] shading=cel: FPS: 1126 FrameTime: 0.888 ms
[bump] bump-render=high-poly: FPS: 514 FrameTime: 1.946 ms
[bump] bump-render=normals: FPS: 1976 FrameTime: 0.506 ms
[bump] bump-render=height: FPS: 1777 FrameTime: 0.563 ms
[effect2d] kernel=0,1,0;1,-4,1;0,1,0;: FPS: 1139 FrameTime: 0.878 ms
[effect2d] kernel=1,1,1,1,1;1,1,1,1,1;1,1,1,1,1;: FPS: 383 FrameTime: 2.611 ms
[pulsar] light=false:quads=5:texture=false: FPS: 2096 FrameTime: 0.477 ms
[desktop] blur-radius=5:effect=blur:passes=1:separable=true:windows=4: FPS: 389 FrameTime: 2.571 ms
[desktop] effect=shadow:windows=4: FPS: 788 FrameTime: 1.269 ms
[buffer] columns=200:interleave=false:update-dispersion=0.9:update-fraction=0.5:update-method=map: FPS: 103 FrameTime: 9.709 ms
[buffer] columns=200:interleave=false:update-dispersion=0.9:update-fraction=0.5:update-method=subdata: FPS: 129 FrameTime: 7.752 ms
[buffer] columns=200:interleave=true:update-dispersion=0.9:update-fraction=0.5:update-method=map: FPS: 158 FrameTime: 6.329 ms
[ideas] speed=duration: FPS: 356 FrameTime: 2.809 ms
[jellyfish] <default>: FPS: 979 FrameTime: 1.021 ms
[terrain] <default>: FPS: 52 FrameTime: 19.231 ms
[shadow] <default>: FPS: 437 FrameTime: 2.288 ms
[refract] <default>: FPS: 88 FrameTime: 11.364 ms
[conditionals] fragment-steps=0:vertex-steps=0: FPS: 1769 FrameTime: 0.565 ms
[conditionals] fragment-steps=5:vertex-steps=0: FPS: 1769 FrameTime: 0.565 ms
[conditionals] fragment-steps=0:vertex-steps=5: FPS: 1853 FrameTime: 0.540 ms
[function] fragment-complexity=low:fragment-steps=5: FPS: 1783 FrameTime: 0.561 ms
[function] fragment-complexity=medium:fragment-steps=5: FPS: 1726 FrameTime: 0.579 ms
[loop] fragment-loop=false:fragment-steps=5:vertex-steps=5: FPS: 1715 FrameTime: 0.583 ms
[loop] fragment-steps=5:fragment-uniform=false:vertex-steps=5: FPS: 1650 FrameTime: 0.606 ms
[loop] fragment-steps=5:fragment-uniform=true:vertex-steps=5: FPS: 1728 FrameTime: 0.579 ms
=======================================================
glmark2 Score: 1119
=======================================================