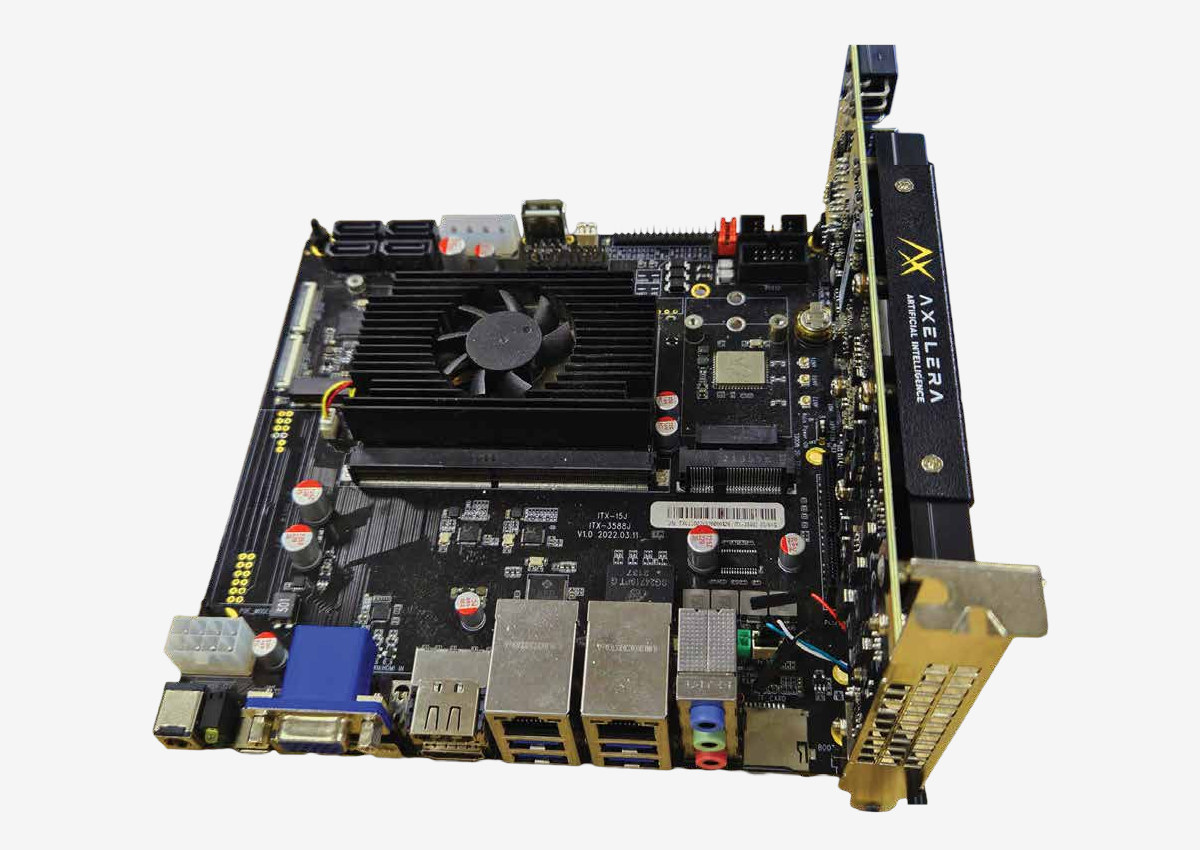
Axelera has announced the general availability of several Metis PCIe AI Evaluation Kits that combine the company’s 214 TOPS Metis AIPU PCIe card with x86 platforms such as Dell 3460XE workstation and Lenovo ThinkStation P360 Ultra computers, Advantech MIC-770v3 or ARC-3534 industrial PCs, or the Firefly ITX-3588J mini-ITX motherboard powered by a Rockchip RK3588 octa-core Cortex-A76/A55 SoC. We’ll look into detail about the latter in this post. When Axelera introduced the Metis Axelera M.2 AI accelerator module in January 2023 I was both impressed and doubtful of the performance claims of the company since packing a 214 TOPS Metis AIPU in a power-limited M.2 module seemed like a challenge. But it was hard to check independently since the devkits were not available yet although the company only started their early-access program in August last year. Now, anybody with an 899 Euros and up budget can try out their larger Metis […]
Axelera Metis PCIe Arm AI evaluation kit combines Firefly ITX-3588J mini-ITX motherboard with 214 TOPS Metis AIPU PCIe card