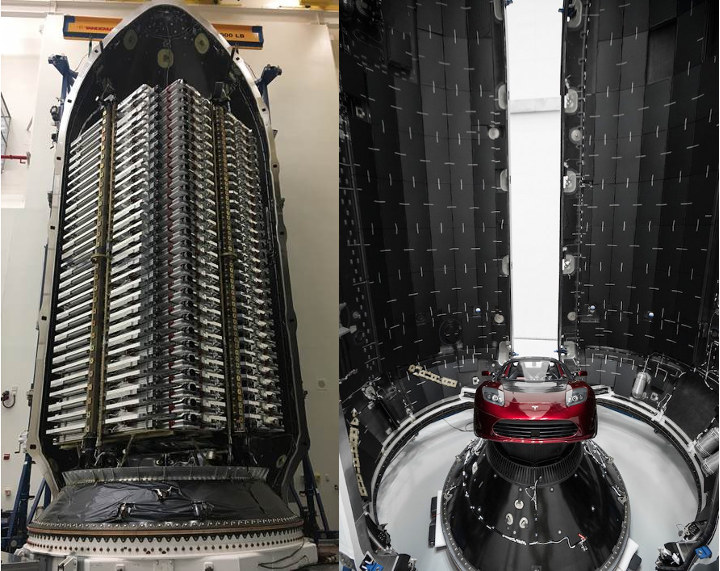
Most embedded systems are used here on planet earth, but some do take off heading for space, and this week I come accross two separate projects leveraging Arm processors and FPGAs, as well as Ubuntu/ROS and Android operating systems: SpaceX Starlink communication satellites and Astrobee robots roaming in the international space station (ISS) SpaceX Starlink Satellites with Xilinx Ultrascale+ Arm + FPGA SoC SpaceX is about to launch a cloud of 60 Starlink communication satellites that aims to provide internet communication anywhere in the world. That’s just a start as eventually the plan is to get up to 12,000 of those satellites. Usually, we would not know many technical details about the satellites, but as one reader pointed out (Thanks Lawrence!), a Reddit thread about the launch, also pointed to a NASA document revealing the satellites are powered by Xilinx Ultrascale+ quad core Cortex-A53 processor with FPGA fabric. Milestone 2 […]
Xilinx Arm FPGA, Snapdragon SoM’s, and Wandboard SBC Field Trip to Space