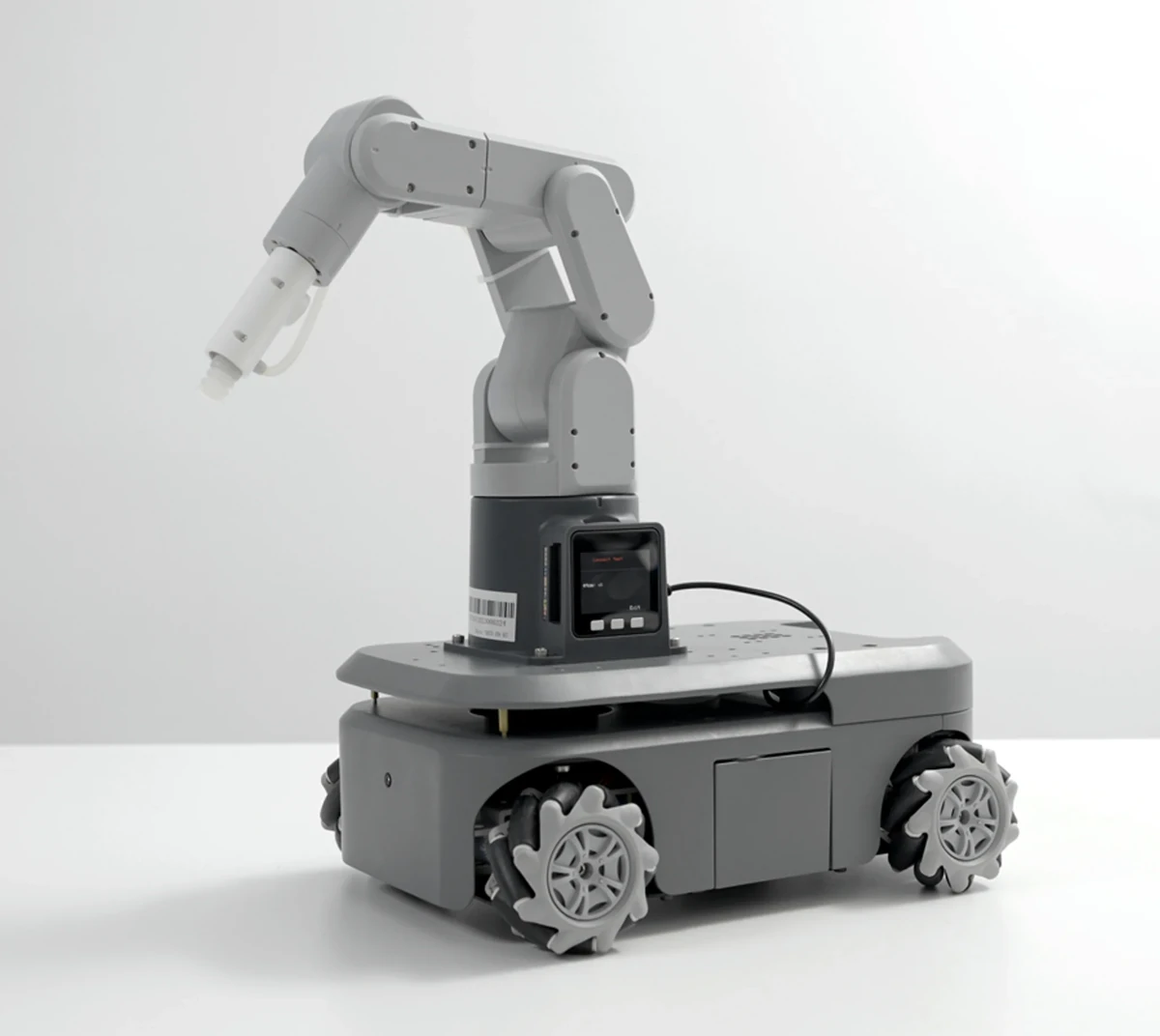
Elephant Robotics myAGV 2023 is a 4-wheel mobile robot available with either Raspberry Pi 4 Model B SBC or NVIDIA Jetson Nano B01 developer kit, and it supports five different types of robotic arms to cater to various use cases. Compared to the previous generation myAGV robot, the 2023 model is fitted with high-performance planetary brushless DC motors, supports vacuum placement control, can take a backup battery, handles large payloads up to 5 kg, and integrates customizable LED lighting at the rear. myAGV 2023 specifications: Control board Pi model – Raspberry Pi 4B with 2GB RAM Jetson Nano model – NVIDIA Jetson Nano B01 with 4GB RAM Wheels – 4x Mecanuum wheels Motor – Planetary brushless DC motor Maximum linear speed – 0.9m/s Maximum Payload – 5 kg Video Output Pi model – 2x micro HDMI ports Jetson Nano model – HDMI and DisplayPort video outputs Camera Pi model – […]
myAGV 2023 four-wheel mobile robot ships with Raspberry Pi 4 or Jetson Nano