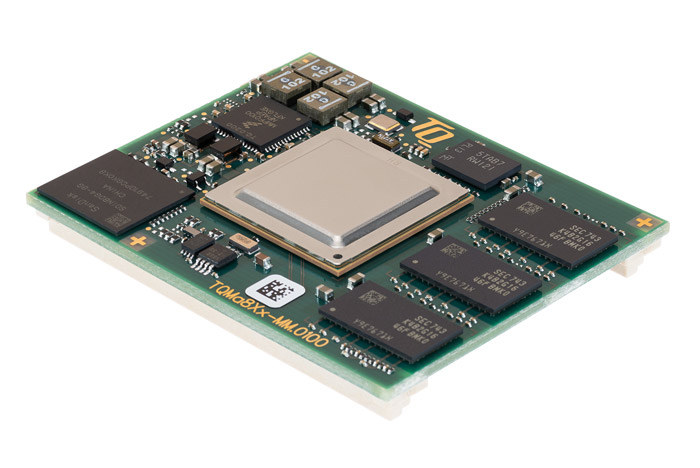
TQ Group, headquartered in Germany, has launched two NXP i.MX 8X Cortex-A35 modules with TQMa8Xx and TQMa8XxS SoMs, with the latter being SMARC 2.1 compliant, and both targeting various applications ranging from medical devices, HMIs, industrial controllers and industrial Internet of Things (IIoT) to gateways, building automation, transport, and robotics. The press release explains NXP will officially launch i.MX 8X CPUs on May 14, 2020. We first heard about i.MX 8X in 2016, before an official announcement in 2017, and we wrote about Toradex i.MX 8X SoM in 2018, plus 96Boards AI-ML SBC in 2019, so I naively believed the processor had been around for a couple of years, but the Toradex SoM product is still shown as an “early product announcement” [Update: the page has just been updated since it is now shipping as well], and AI-ML board has just launched with 26 units available on Arrow website. Some […]
TQ Group Announces NXP i.MX 8X ARM Cortex-A35 Modules as the Processor Finally Becomes Available