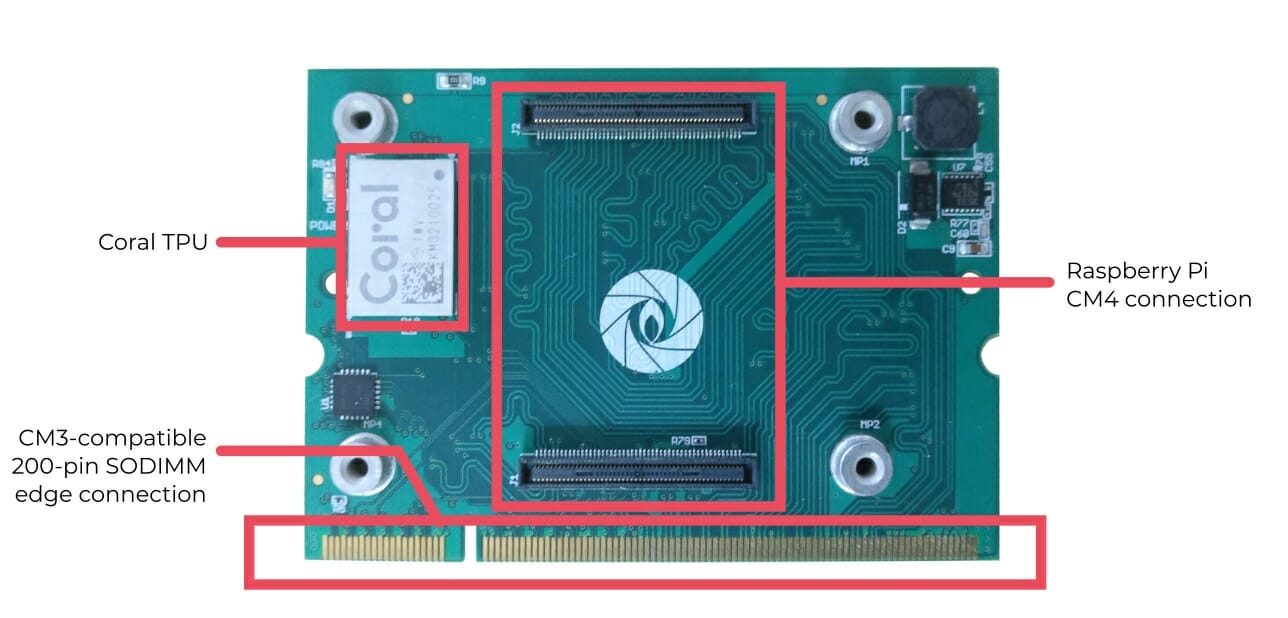
Raspberry Pi Trading has just launched 32 different models of Raspberry Pi CM4 and CM4Lite systems-on-module, as well as the “IO board” carrier board. But the company has also worked with third-parties, and Gumstix, an Altium company, has unveiled four different carrier boards for the Raspberry Pi Compute Module 4, as well as a convenient CM4 to CM3 adapter board that enables the use of Raspberry Pi CM4 on all/most carrier boards for the Compute Module 3/3+. Raspberry Pi CM4 Uprev & UprevAI CM3 adapter board Gumstix Raspberry Pi CM4 Uprev follows the Raspberry Pi Compute Module 3 form factor but includes two Hirose connectors for Computer Module 4. The signals are simply routed from the Hirose connectors to the 200-pin SODIMM edge connector used with CM3. Gumstix Raspberry Pi CM4 Uprev is the same except it adds a Google Coral accelerator module. Gumstix Raspberry Pi CM4 Development Board Specifications: […]
Gumstix Introduces CM4 to CM3 Adapter, Carrier Boards for Raspberry Pi Compute Module 4