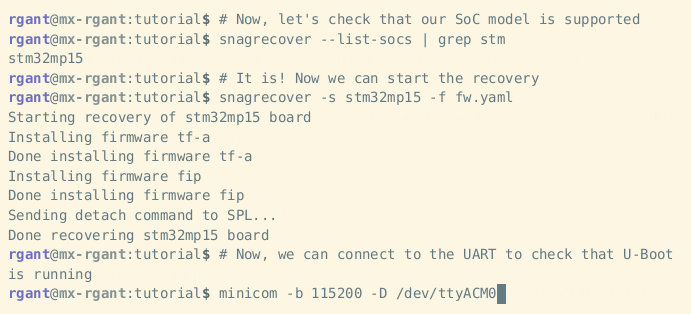
Bootlin has just released the Snagboot open-source recovery tool for embedded platforms designed to work with multiple vendors, and currently STMicro STM32MP1, Microchip SAMA5, NXP i.MX6/7/8, Texas Instruments AM335x and AM62x, and Allwinner “sunxi” processors are supported. Silicon vendors usually provide firmware flashing tools, some closed-source binaries, that only work with their hardware. So if you work on STM32MP1 you’d use STM32CubeProgrammer, while SAM-BA is the tool for Microchip processors, NXP i.MX SoC relies on UUU, and if you’ve ever worked on Allwinner processors you’re probably family with sunxi-fel. Bootlin aims to replace all those with the Snagboot recovery tool. The Python tool is comprised of two parts: snagrecover using vendor-specific ROM code mechanisms to initialize external RAM and run the bootloader (typically U-Boot) without modifying any non-volatile memories. snagflash communicates with the bootloader over USB to flash system images to non-volatile memories, using either DFU, USB Mass Storage, or […]
Snagboot is an open-source cross-vendor recovery tool for embedded targets