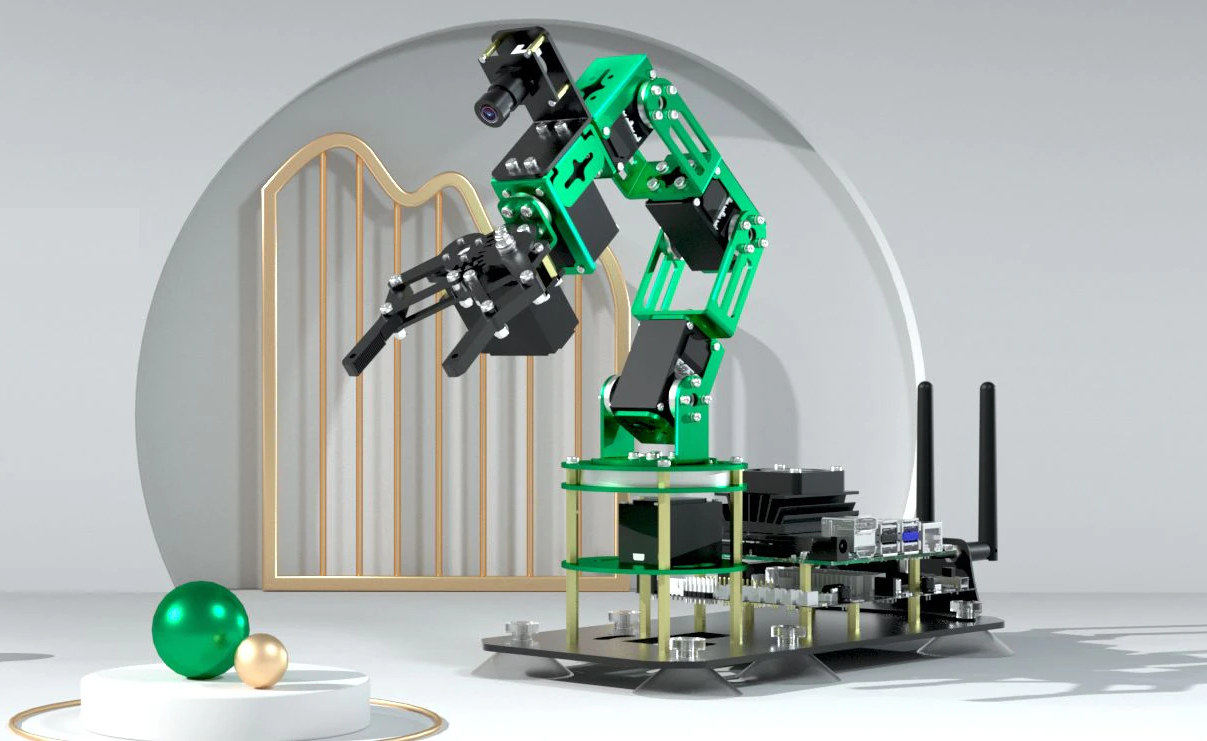
The CM4 XGO Lite is a smart robot dog based on Raspberry Pi CM4 system-on-module and designed to learn to program using Blockly, Python, and ROS. This four-legged robot also happens to feature a 3-joint robot arm and a robot gripper installed on the back that can pick up light objects. The Raspberry Pi CM4 module drives the LCD screen and camera and performs AI and computer vision processing, while each joint is controlled with a servo motor, and a 6-axis tilt sensor ensures stable walking and movement. We’ve already discussed the capabilities of the CM4 XGO Lite, aka XGO Lite 2, when it was announced earlier this year, so we’re not going to go into details here, but some of the highlights include support for faster AI edge computing applications such as face detection and object classification, omnidirectional movement, six-dimensional posture control, posture stability, and multiple motion gaits. Robot […]
Review of CM4 XGO Lite – A Raspberry Pi CM4 based smart robot dog with a robotic arm