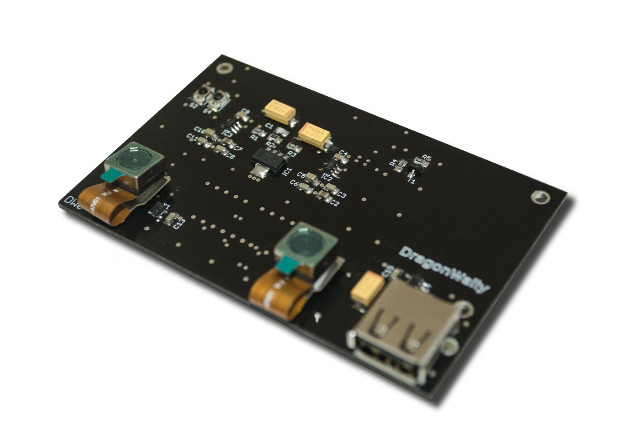
We previously covered Q-Wave Systems’ Melon S3 board combining a Xilinx Spartan 3E FPGA with ESP8266, but the Thai company is back is a completely different product: EagleEye Smart Camera. The board is powered by Raspberry Pi Compute Module 3+ (CM3+) with 16GB or 32GB flash, and equipped with a 5 MP camera for machine vision and robotics applications. There are two version of the board Uno and Industrial with the latter adding 24V digital input and outputs, circuit protections and support for industrial temperature range. EagleEye smart camera key features & specifications: SoM – Raspberry Pi CM3+ with Broadcom BCM2837B0 quad core cortex-A53 processor, 1 GB RAM, and 16GB or 32 GB flash Camera – 5 MP OV5647 image sensor, CS/M12 lens holder + 4mm CS lens Video Output – mini HDMI port Networking – 10/100M Ethernet USB – 1x USB 2.0 host port up to 1.2A Expansion Uno […]
Raspberry Pi CM3+ based EagleEye Smart Camera Works with OpenCV and LabVIEW NI Vision