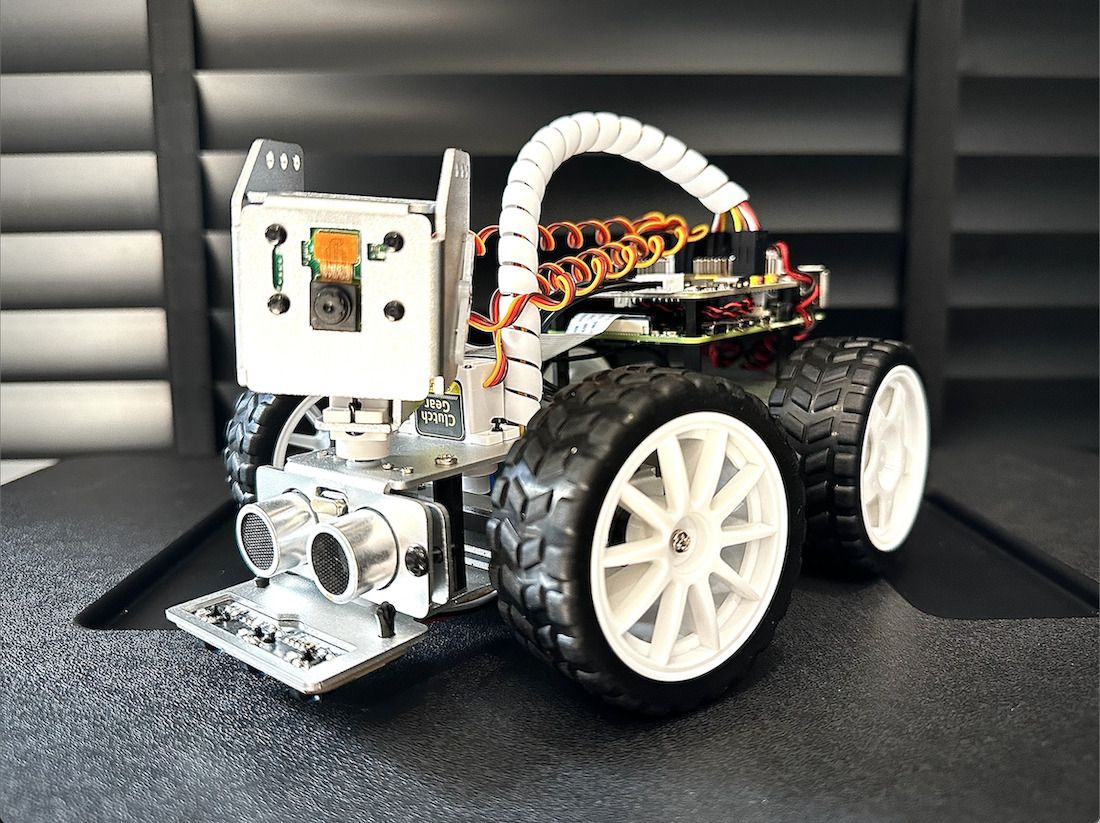
SunFounder PiCar-X 2.0 is an AI-powered self-driving robot car using the Raspberry Pi 3/4 as the main processing board. It is equipped with a camera module that can be moved by a 2-axis servo motor, allowing the camera to pan or tilt, an ultrasonic module for detecting distant objects, and a line detection module. The PiCar-X robot can also perform computer vision tasks such as color detection, face detection, traffic signs detection, automatic obstacle avoidance, and automatic line tracking. The PiCar-X can be programmed with two computer languages: Blockly-based Ezblock Studio drag-and-drop program and Python, and the robot works with OpenCV computer vision library and TensorFlow for AI workloads. Finally, you can also control the robot through the SunFounder controller application on your mobile phone. The company sent us a sample of the Picar-X 2.0 for review, so let’s get started. SunFounder PiCar-X 2.0 robot overview The PiCar-X robot kit […]
SunFounder PiCar-X 2.0 review – A Raspberry Pi 4 AI robot car programmable with Blockly or Python