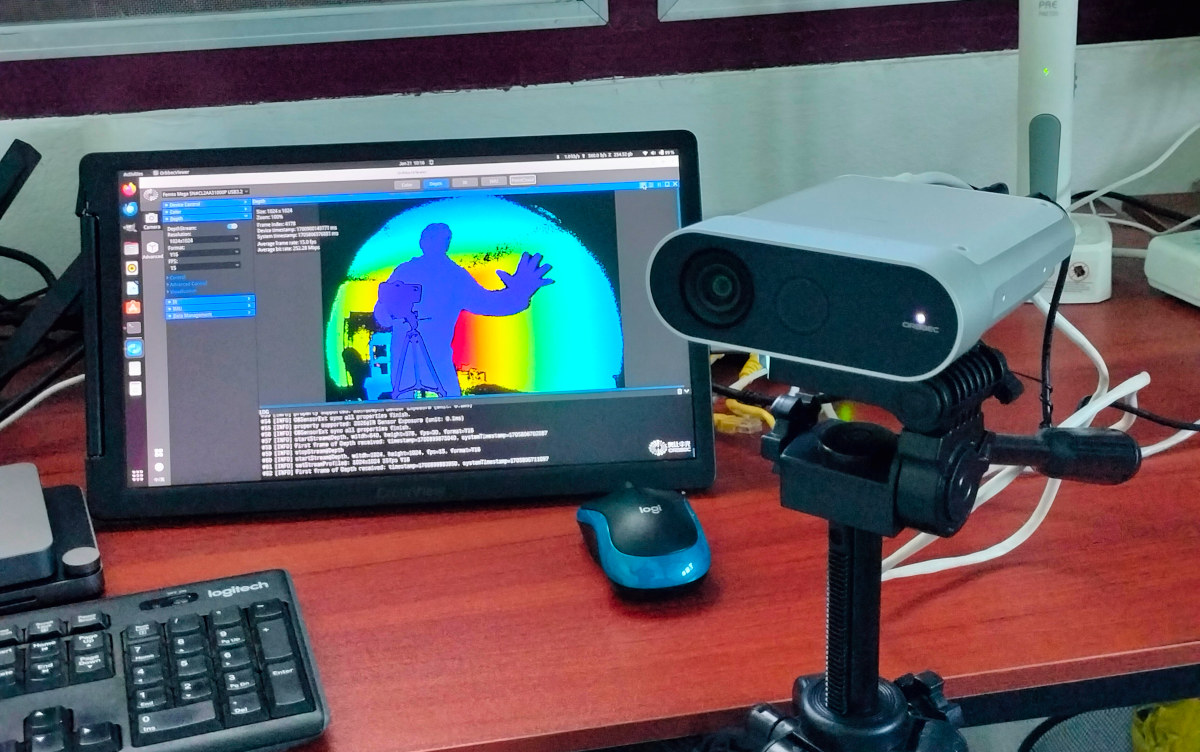
We had a quick look at the Orbbec Femto Mega 3D depth and 4K RGB camera at the end of last year with a look at the hardware and a quick try with the OrbbecViewer program in Ubuntu 22.04. I’ve now had the time to test the OrbbecViewer in more detail, check out the Orbbec SDK in Linux and various samples, and finally test the Femto Mega with a body tracking application using Unity in Windows 11. A closer look at OrbbecViewer program and settings As noted in the first part of the review, the OrbbecViewer program provides color, depth, and IR views for the camera. Let’s go into details for each. The Color mode would be the same as your standard USB color camera. The Femto Mega supports resolution from 1280×720 at 30 fps to 3840×2160 at 25 fps using MJPG, H.264, H.265, or RGB (converted from MJPG). We […]
Femto Mega 3D depth camera review – OrbbecViewer and Orbbec SDK in Ubuntu 22.04, body tracking in Windows 11