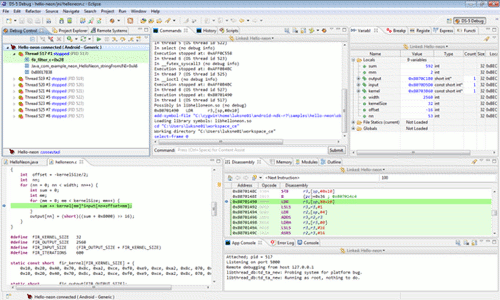
The Linaro Android Platform Team has just posted a weekly update to their progress. They are going to release 11.12 very soon with hardware graphics acceleration to 2 of their members development boards: ST Ericsson Nova A9500 Snowball and Samsung Exynos 4212 Origen boards. So if you have any boards or products based on those processors you should be able to get an hardware optimized version very soon. Hardware acceleration is already available on all OMAP4 platform such as Pandaboard, since this was the default Android ICS target. They also introduced support for the ARM DS-5 debugger, an Eclipse plug-in to help developer create high performance performance and low power native software by integrating a graphical debugger for code generated for the Android Native Development Kit (NDK) and a basic version of the ARM Streamline performance analysis tool. Here’s a list of this week achievements: Key Points for wider discussion […]
Android 4.0 Hardware Graphics Acceleration Coming to More Platforms