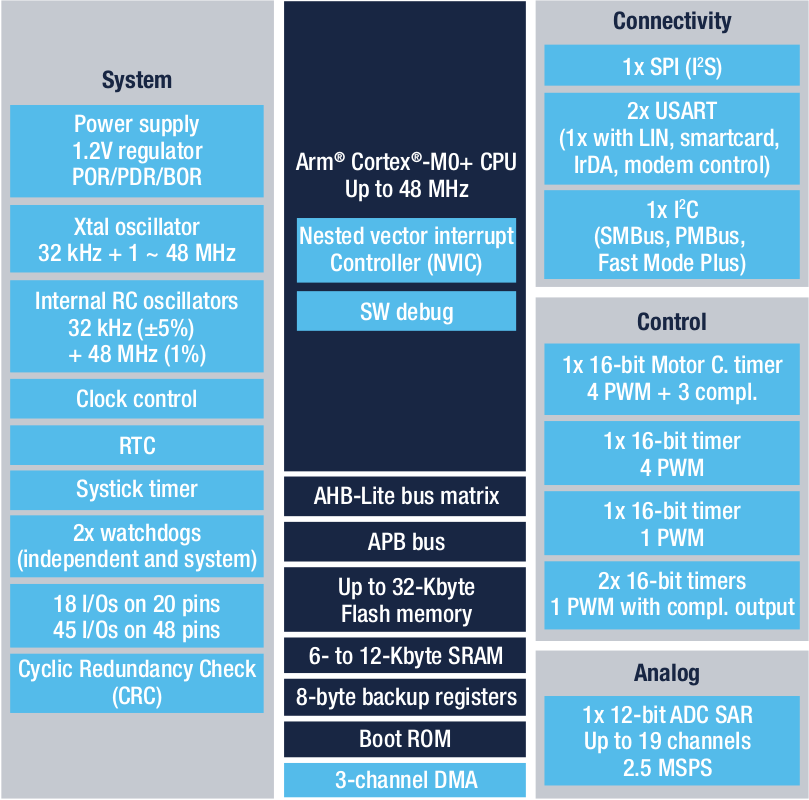
STMicroelectronics has announced the STM32H5 Arm Cortex-M33 “high-performance” microcontroller family clocked at up to 250 MHz and supporting STM32Trust TEE Secure Manager to boost both performance and security in “next-generation smart applications”. The STM32H5 family has three product types namely the higher-end STM32H563/573 with up to 2MB flash, 640KB SRAM, Ethernet, and hardware security, the STM32H562 with a similar design but fewer interfaces, and the entry-level STM32H502 with 128KB flash, 32KB SRAM. STM32H5 key features and specifications: MCU core – Arm Cortex-M33 core with TrustZone technology, digital signal processing (DSP) and floating-point unit (FPU) running up to 250 MHz; Up to 375 DMIPS and a 1023 CoreMark score executing from the flash memory Memory and Storage STM32H563/573/562 – 1 to 2 Mbytes of flash memory, 640 Kbytes of SRAM STM32H503 – 128 Kbytes of flash memory and 32 Kbytes of RAM. OSPI serial flash memory interface Up to 2x SDMMC […]
STMicro STM32H5 Arm Cortex-M33 MCU clocks at 250 MHz, supports STM32Trust TEE Secure Manager