
After Huawei engineer Peng Zhihui Jun fell off this bicycle, he decided he should create a self-balancing, self-riding bicycle, and ultimately this gave birth to the XUAN-Bike, with XUAN standing for eXtremely, Unnatural Auto-Navigation, and also happening to be an old Chinese name for cars.
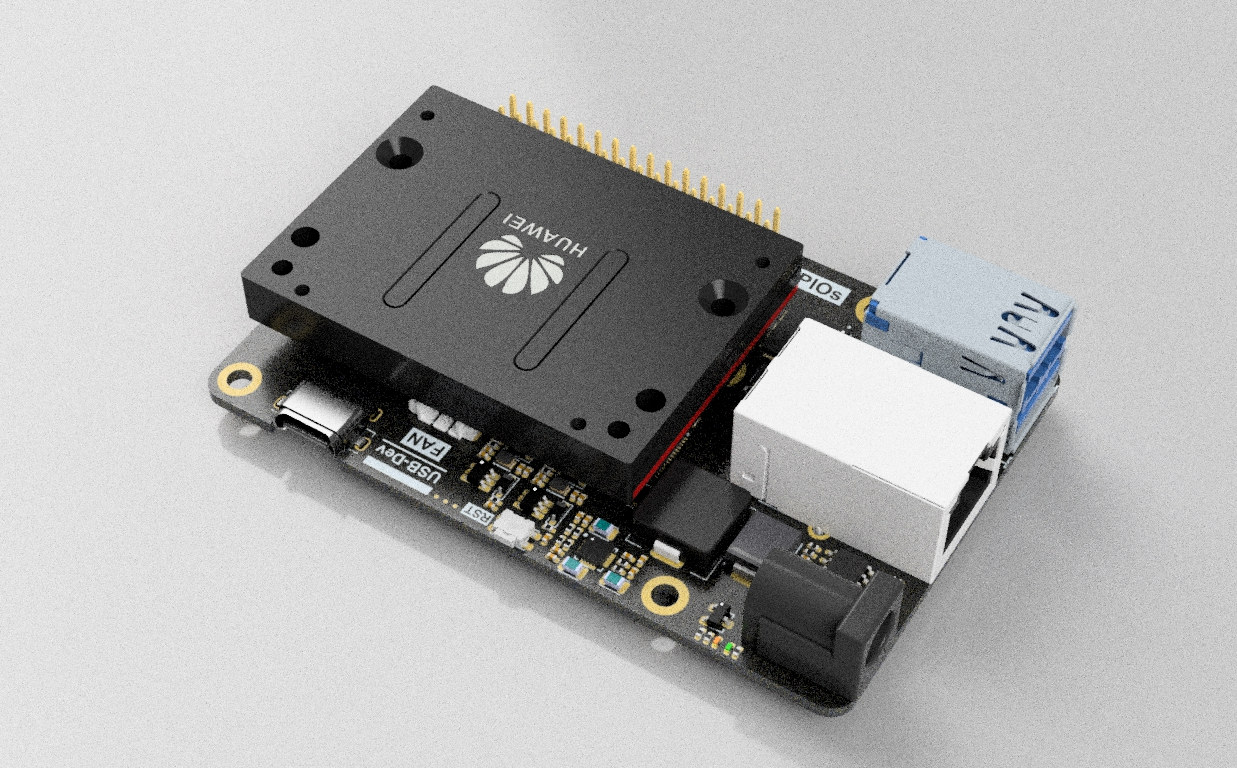
The bicycle relies on a flywheel and a control board with ESP32 and MPU6050 IMU for stabilization connected over a CAN bus to the motors, as well as Atlas 200 DK AI Developer Kit equipped with the 22 TOPS Huawei Ascend A310 AI processor consuming under 8W connected to a 3D depth camera and motor for self-riding.

It’s not the first time we see this type of bicycle or even motorcycle, but the XUAN-Bike design is also fairly well-documented with the hardware design (electronics + 3D Fusion360 CAD files) and some documentation in Chinese uploaded to Github.
The software part has not been released so far “because the coupling of the FOC drive is not universal”, but Peng promise to release a simplified version of the bicycle complete solution using a small DC motor including the source code later on. He also plans to release a Robot Embedded Development Framework (REF) that abstracts some commonly used tools and development models in robot development.
The electric bicycle is fitted with a Lithium-Ion battery that’s good for 2 or 3 hours. That would be without a rider, as all demos below are made without a “passenger” since the flywheel would not be able to balance that much extra weight.
The video explains it all in Chinese, but the machine-translated? English subtitles do help get a better grasp of the design.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress


