
The Apache Software Foundation has recently released version 0.9 Apache Mynewt open source real-time operating systems for micro-controllers under… an Apache 2.0 license. The RTOS works on STMicro STM32 Cortex-M4, and Arduino Zero / M0 Cortex-M0 boards, but they’ve also implemented the first open source Bluetooth Low Energy stack for MCUs, starting with support for Nordic Semi nRF52 Cortex-M4 and nRF51 Cortex-M1 evaluation boards, and acting as a replacement for Nordic SoftDevice Bluetooth Smart / LE solution.
 The operating system competes with ARM mbed, the Zephyr Project, and RIoT, but the foundation claims it is the only one that’s both community driven and permissively licensed (Apache 2.0) project in the embedded space.
The operating system competes with ARM mbed, the Zephyr Project, and RIoT, but the foundation claims it is the only one that’s both community driven and permissively licensed (Apache 2.0) project in the embedded space.
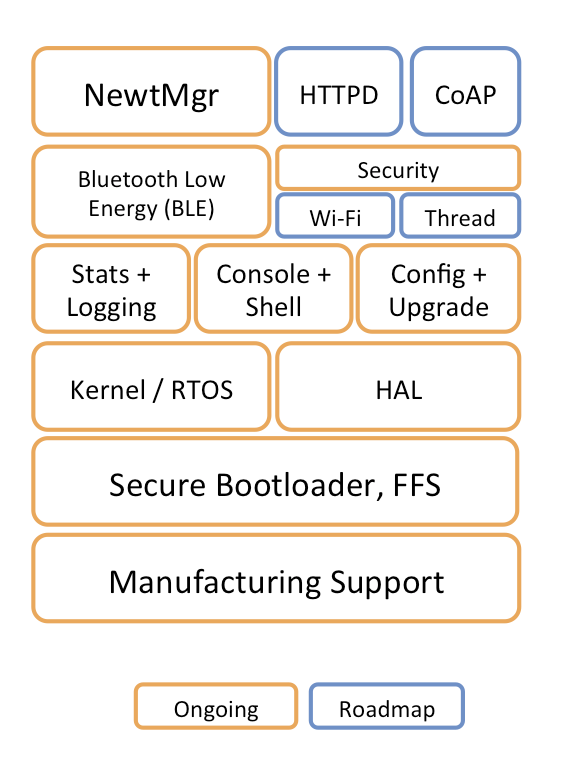
The OS is modular and can be configured with a Go-like build and package management tool with components such as secure boot loader, flash file system and TLV storage mechanism, rich logging infrastructure, circular buffering schemes, and Bluetooth 4.2 Low Energy. WiFi, Thread, and Bluetooth 5 are also part of the roadmap, and support for Javascript and Python is currently being worked on.
You can find more information and/or get started with the project on Apache Mynewt microsite.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress


