
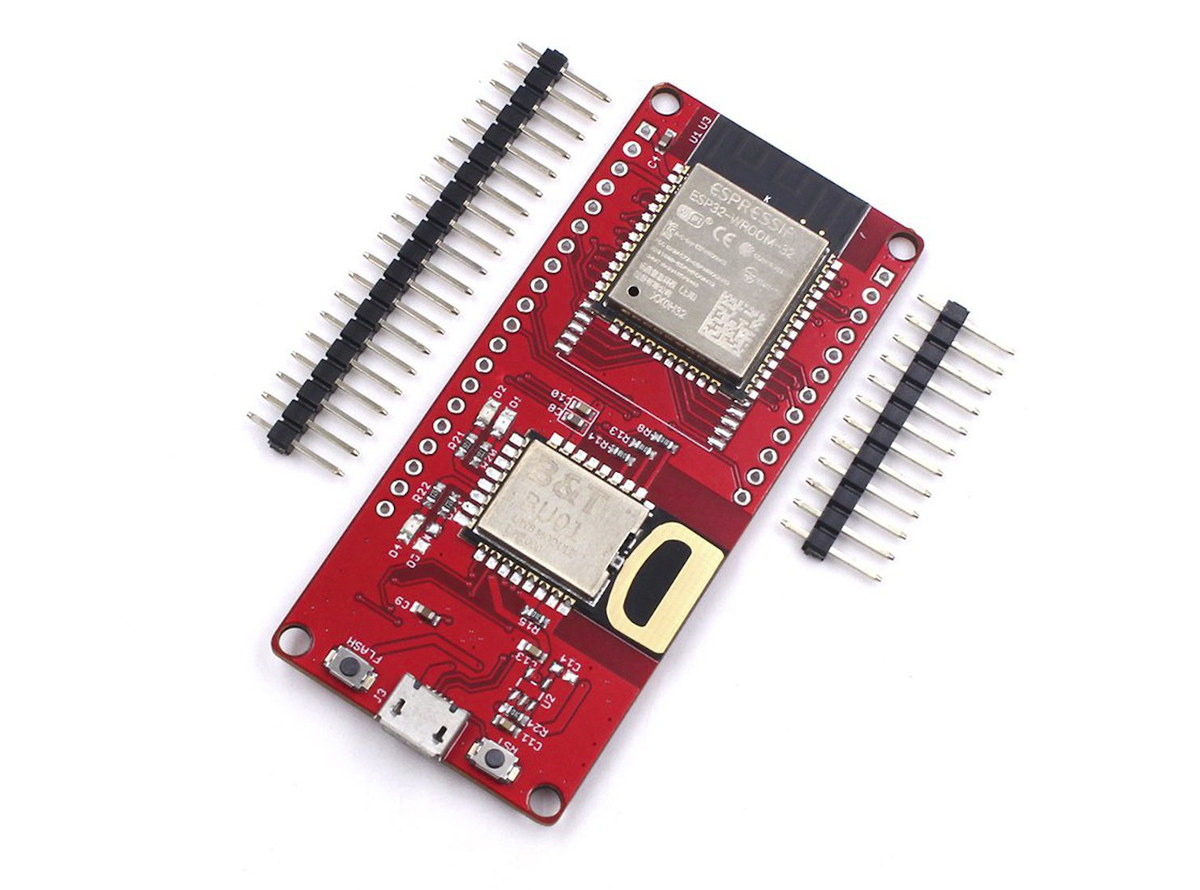
FiRa “Fine Ranging” UWB technology was introduced a few years ago and is now found in devkits and Apple U1 chip. Makerfabs ESP32 UWB board provides another option with Espressif ESP32-WROVER-32 or ESP32-WROOM-32 WiFi & Bluetooth module combined with a Decawave DW1000 module for precision tracking.
Makerfabs explains the board acts like a continuously scanning radar that locks onto another device (called Anchor, since it’s usually in a fixed location) and communicates with it to determine the distance between objects by calculating the time of flight (ToF) between devices, or in other words, the roundtrip time of challenge/response packets.
 ESP32 UWB board specifications:
ESP32 UWB board specifications:
- Wireless modules:
- WiFi & Bluetooth LE – ESP32-WROVER-32 or ESP32-WROOM-32 module with ESP32 dual-core processor @ 240 MHz
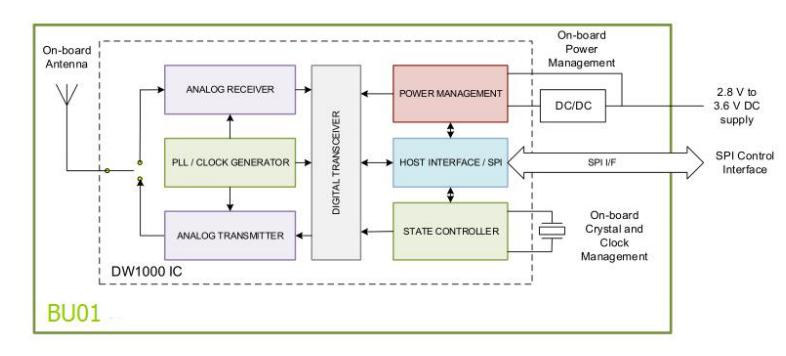
- UWB – B&T BU01 module based on Decawave DW1000 chip; IEEE802.15.4-2011 UWB compliant wireless transceiver module with a precision of 10cm indoors, a data rate of up to 6.8 Mbps, and a range of up to 300m
- USB – 1x Micro USB port for power and programming
- Expansion – 20-pin and 12-pin GPIO headers for expansion
- Misc – Reset and Flash buttons
- Power Supply – 5V via micro USB port
The board is open-source hardware with both hardware (EAGLE) and software available on Github, plus a Wiki on Makerfabs’ website. The software consists of Arduino sketches for UWB Anchor and UWB Tag, as well as another “Indoor positioning” Arduino sketch running a web server combined with Python script to plot the location on a computer or SBC. There’s also a demo showing the location on a small display attached to a Tag. You’ll need at least one Tag and one Anchor for distance measurement, but indoor positioning requires at least two Anchors. You can watch a demo in the video below
Makerfabs ESP32 UWB board is sold with either ESP32 WROOM or WROVER module for around $40 on Tindie or directly on Makerfabs online store.
Via Hackster.io

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress


