
What comes after Teensy 4.0? Teensy 4.1. The new version of the Arduino compatible board is powered by the same NXP i.MX RT1062 Cortex-M7 crossover processor clocked at 600 MHz, but about doubling in length in order to add a 10/100 Mbit Ethernet PHY, a MicroSD card slot, and offer more I/Os.
Teensy 4.1 also increases flash memory to 8 MB (vs 2 MB for Teensy 4.0), and the USB hot-plugging power management circuitry needed to plug a USB device via a USB host cable.
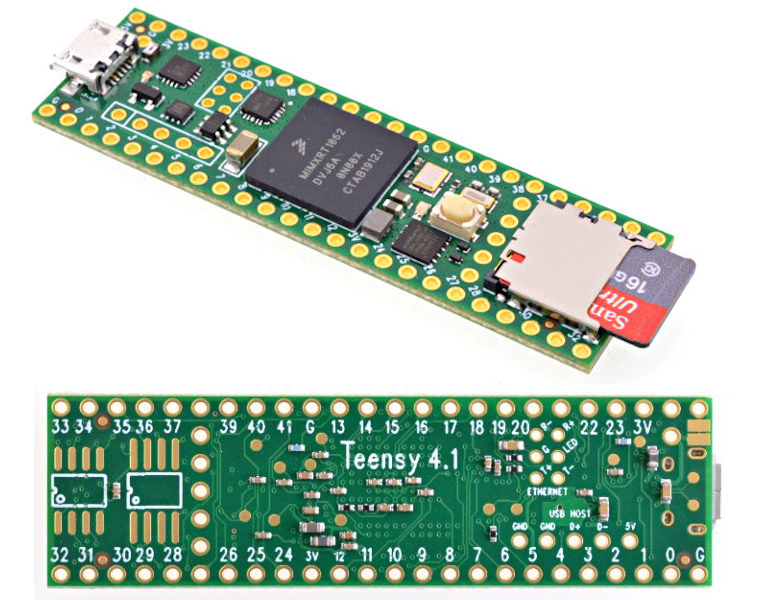
Teensy 4.1 specifications:
- SoC – NXP i.MX RT1062 Arm Cortex-M7 processor at 600 MHz with 1024KB RAM (512KB is tightly coupled),
- Storage – 8 MB serial flash (64KB reserved for recovery & EEPROM emulation), MicroSD Socket, footprints for 2x extra QSPI chips such as flash or 8MB PSRAM chip
- USB – 1x micro USB port for power and programming
- Networking – 6-pin Ethernet header via 10/100 Mbit DP83825 PHY
- Expansion via through-holes and pads
- USB – 2x USB ports, both 480 MBit/sec (5 pins with power management)
- Storage – 1x SDIO (4 bit) native SD
- Audio – 2x I2S Digital Audio, 1x S/PDIF Digital Audio
- Serial – 8x Serial, all with 4 byte FIFO; 3x CAN Bus (1x with CAN FD)
- 35x PWM pins
- 40x digital pins, all interrupt capable
- 18x analog pins, 2x ADCs on chip
- 3x SPI, all with 16 word FIFO; 3x I2C, all with 4 byte FIFO
- Total I/O pins – 55 (vs 40 for Teensy 4.0)
- Security – Cryptographic Acceleration; Random Number Generator
- Misc – RTC for date/time, 32x general-purpose DMA channels, Programmable FlexIO, Pixel Processing Pipeline, Peripheral cross triggering, Power On/Off management
- Power Supply – 5V via micro USB port
- Dimensions – 7.2 x 1.8 cm (TBC)
The software is mostly software compatible with Teensy 4.0, and can also be programmed in Arduino IDE using Teensyduino software add-on.
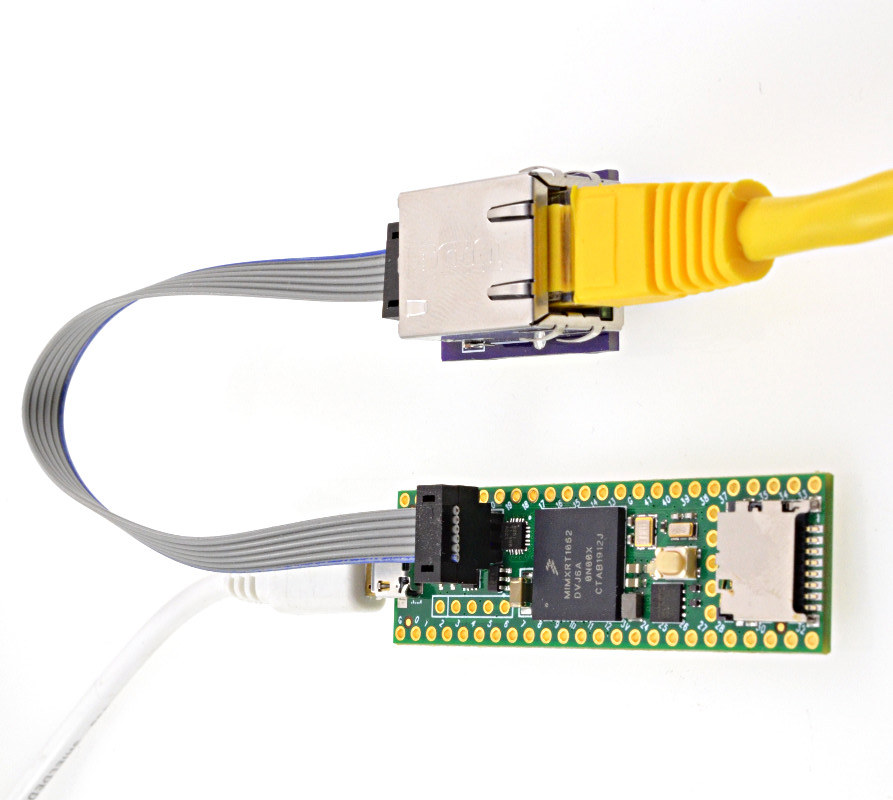
Plugging an Ethernet cable requires a small adapter board that plugins into the 6-pin Ethernet header on the board. Fast Ethernet was added in order to support low latency & high bandwidth requirements of applications such as Artnet LED projects, streaming audio, open sound control, etc… where SPI Ethernet would just not cut it. The Ethernet port also supports IEEE1588 precision packet timestamping for those who need this feature.
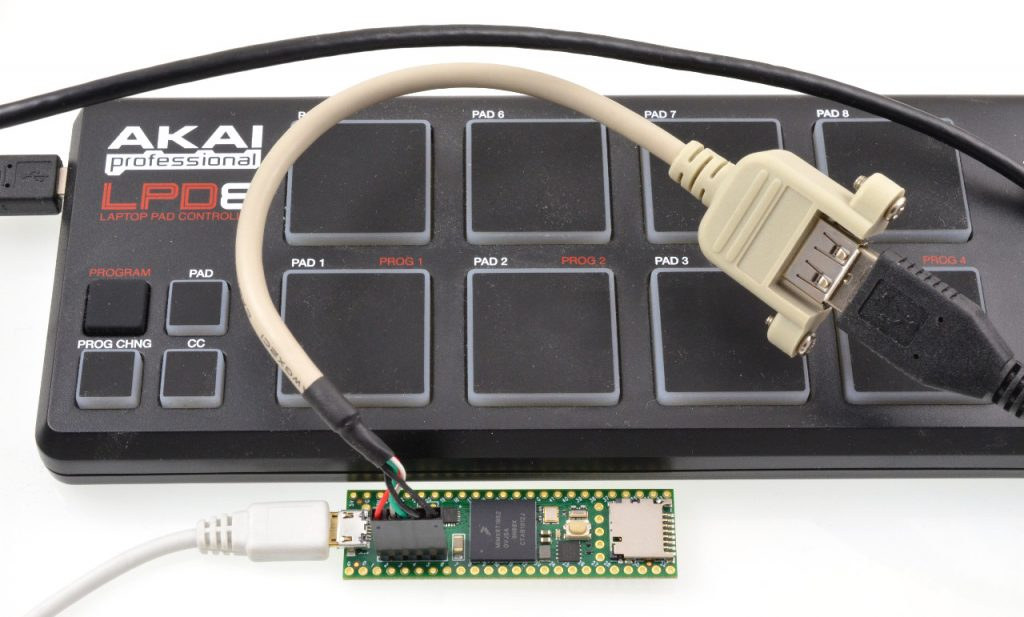
USB follows the same concept as Ethernet, meaning you’d need to connect a cable with USB female port into the 5-pin USB header of the board, before connecting a USB device such as a keyboard, or even a USB hub. The developer – Paul Stoffregen – notes that while Teensy 4.0 already had those USB host data signals exposed on SMD pads, Teensy 4.1 now supports hot-plugging to directly connect a USB device at any time. USB devices are supported by Paul’s USBHost_t36 library in the Arduino IDE.
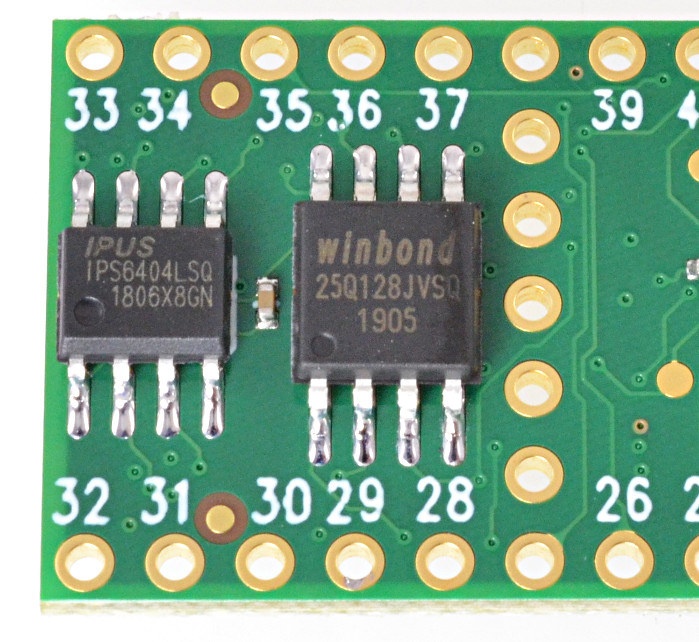
The new Teensy board supports additional SQPI memory and/or storage if needed. For example, an additional 8MB PSRAM can be required for high-resolution TFT displays, buffering data, some special audio effects, as well as emulation of retro games.
Since not everybody may need those extra features and I/Os, and Teensy 4.0 is still available for $19.95, but if you have specific requirements met by Teensy 4.1, it can be purchased for $26.85 via the product page, where you’ll find documentation and links to accessories including USB host cable and 8MB QSPI flash. However, the Ethernet adapter is not sold just yet and only available as a DIY project.

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress


