
I purchased Qualcomm DragonBoard 410c development board last year, and first tested it and run some benchmark on the 96Boards compliant hardware with Android. I found that it was still work-in-progress, and decided to wait before trying Debian on the board. I’ve now done so, and will report by experience installing Debian Linux, playing with the board, and running Phoronix benchmarks to compare it to other ARM Linux boards.
Installing Debian on DragonBoard 410c
The first challenge is to navigate through the documentation that is not always clear or up-to-date. I eventually ended up on DragonBoard 410c Wiki on Github.
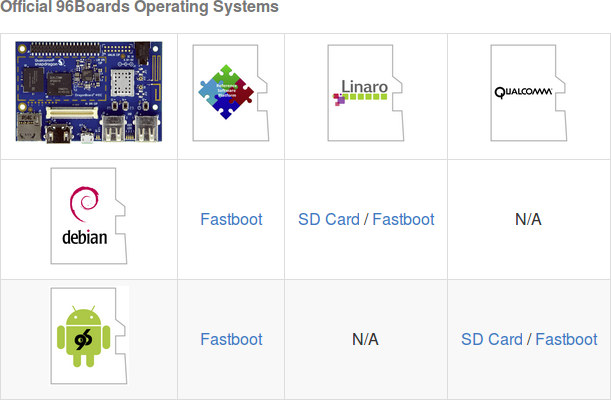 You then have to decided which image you want. While there are two official operating systems with Android and Debian, you can three “entities” releasiong their own images. For Debian specifically, you have the Linaro image, and Reference Platform Build (RPB) image. I could not find any changelog or known issues with the former, but the latter as its own Wiki with the latest release being RPB 16.03 (March 2016), and the next one scheduled to be RPB 16.06 in June.
You then have to decided which image you want. While there are two official operating systems with Android and Debian, you can three “entities” releasiong their own images. For Debian specifically, you have the Linaro image, and Reference Platform Build (RPB) image. I could not find any changelog or known issues with the former, but the latter as its own Wiki with the latest release being RPB 16.03 (March 2016), and the next one scheduled to be RPB 16.06 in June.
That’s the current list of known issues
- bug 285 USB host doesn’t detect any plugged devices
- bug 121 [RPB] Cannot soft power off or shutdown db410c
- bug 284 [RPB] Dragon board Display sleep not working
- bug 289 [RPB] USB devices don’t work after reboot
- bug 207 [RPB] Bluetooth does not work on Dragon board debian
- bug 153 [RPB] Missing information about hwpack usage
USB host not working did not inspire confidence, so I first tested the Linaro image. The (other) Wiki points to the “latest version”, but the link would point to Linaro Debian 16.02 release, while I could find a more recent Linaro Debian 16.04 which I downloaded in a terminal:
|
1 2 |
wget https://builds.96boards.org/releases/dragonboard410c/linaro/debian/16.04/dragonboard410c_sdcard_install_debian-83.zip unzip dragonboard410c_sdcard_install_debian-83.zip |
I used a micro SD card to install it. If you use Windows, simply use Win32DiskImager, but in computer running Linux or in Windows via Windows subsystem for Linux, you may want to do it in the terminal. First check the SD card device with lsblk. Mine was /dev/sdb, but your may be different, and I use /dev/sdX in the command below tp flash the Debian installer to a micro SD card:
|
1 2 3 4 |
sudo umount /dev/sdX* sudo apt install pv sudo dd if=db410c_sd_install_debian.img | pv | sudo dd of=/dev/sdX bs=16M sync |
Now remove the micro SD card from your computer and insert it in to the board, set the jumper to boot from SD card on the DragonBoard 410c, and connect the power. I could see LED 1 blinking, but nothing on my HDMI TV. Last time, I did not manage to make the serial console (requiring a 1.8V USB to TTL board or cable) using Hardkernel ODROID board, so I went to the support forums, and after several minutes of reading, I found that the RPB image is recommended, as well as a clear explanation between the Linaro and RPB images:
Use the Reference Platform Build instead of the Linaro release. The Reference Platform is an integrated build with support for multiple boards, and that is where all engineering effort is going. The Linaro build is the old single-platform image that we’re not working on anymore.
The reference platform will run on all 96boards CE (Consumer Edition) and EE (Enterprise Edition), while the Linaro image is built specifically for a given board, and they are not really working on it. [Update: This answer was specific to Hikey board, and for DragonBoard 410c there are two images provided by Qualcomm Landing Team and the Reference Platform team]
So let’s start again from scratch using the RPB image, and download the bootloader, Linux kernel and rootfs to my Ubuntu computer:
|
1 2 3 |
wget https://builds.96boards.org/releases/dragonboard410c/linaro/rescue/latest/dragonboard410c_bootloader_emmc_linux-*.zip wget https://builds.96boards.org/releases/reference-platform/debian/dragonboard410c/16.03/dragonboard410c-boot-linux-*.img.gz wget https://builds.96boards.org/releases/reference-platform/debian/dragonboard410c/16.03/dragonboard410c-rootfs-debian-jessie-alip-*.emmc.img.gz |
Now find a micro USB to USB cable to connect to DragonBoard 410c, install fastboot…
|
1 |
sudo apt-get install android-tools-fastboot |
.. and check the device is detected:
|
1 2 |
jaufranc@FX8350:~$ fastboot devices ddb2310 fastboot |
Good. After making sure the jumper switch is set to 0000 on the board again, we can extract the three files, and install Debian as follows:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 |
unzip dragonboard410c_bootloader_emmc_linux-\*.zip fastboot flash partition gpt_both0.bin fastboot flash hyp hyp.mbn fastboot flash modem NON-HLOS.bin fastboot flash rpm rpm.mbn fastboot flash sbl1 sbl1.mbn fastboot flash sec sec.dat fastboot flash tz tz.mbn fastboot flash aboot emmc_appsboot.mbn fastboot erase boot fastboot erase rootfs fastboot erase devinfo gunzip dragonboard410c-boot-linux-\*.img.gz fastboot flash boot dragonboard410c-boot-linux-*.img gunzip dragonboard410c-rootfs-debian-jessie-alip-\*.emmc.img.gz fastboot flash rootfs dragonboard410c-rootfs-debian-jessie-alip-*.emmc.img |
That was a lot of commands to install the operating system… Now you can unplug the board, remove the micro USB cable, and connect the power again. After a few seconds, you should see the kernel log, and eventually LXDE desktop environment.

You’ll be asked to configure WiFi, and you’re basically done.
DragonBoard 410c Debian System Info
I’ve then run a few command to learn more about the image and system:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 |
linaro@linaro-alip:~$ uname -a Linux linaro-alip 4.4.0-104-arm64 #1 SMP Debian 4.4.0.linaro.104-1.linarojessie.1 (2016-03-01) aarch64 GNU/Linux linaro@linaro-alip:~$ cat /etc/issue Debian GNU/Linux 8 \n \l linaro@linaro-alip:~$ free -h total used free shared buffers cached Mem: 833M 766M 67M 105M 20M 375M -/+ buffers/cache: 370M 463M Swap: 0B 0B 0B linaro@linaro-alip:~$ df -h Filesystem Size Used Avail Use% Mounted on udev 10M 0 10M 0% /dev tmpfs 167M 7.0M 160M 5% /run /dev/mmcblk0p10 6.9G 1.9G 4.8G 28% / tmpfs 417M 5.4M 412M 2% /dev/shm tmpfs 5.0M 4.0K 5.0M 1% /run/lock tmpfs 417M 0 417M 0% /sys/fs/cgroup tmpfs 84M 12K 84M 1% /run/user/1000 tmpfs 84M 0 84M 0% /run/user/0 /dev/mmcblk0p1 64M 22M 42M 35% /media/linaro/00BC-614E linaro@linaro-alip:~$ cat /proc/cpuinfo processor : 0 BogoMIPS : 38.40 Features : fp asimd evtstrm crc32 CPU implementer : 0x41 CPU architecture: 8 CPU variant : 0x0 CPU part : 0xd03 CPU revision : 0 processor : 1 BogoMIPS : 38.40 Features : fp asimd evtstrm crc32 CPU implementer : 0x41 CPU architecture: 8 CPU variant : 0x0 CPU part : 0xd03 CPU revision : 0 processor : 2 BogoMIPS : 38.40 Features : fp asimd evtstrm crc32 CPU implementer : 0x41 CPU architecture: 8 CPU variant : 0x0 CPU part : 0xd03 CPU revision : 0 processor : 3 BogoMIPS : 38.40 Features : fp asimd evtstrm crc32 CPU implementer : 0x41 CPU architecture: 8 CPU variant : 0x0 CPU part : 0xd03 CPU revision : 0 |
One of the main advantage of 96Boards should be recent Linux version,and that’s exactly what we have here with Linux 4.4 running on the board. Out of a total of 866MB reported RAM, 64MB is free, and the 6.9GB rootfs has 4.8 GB available to the user. Snapdragon 410 SoC is correctly reported as being a quad core Cortex A53 (0xd03) processor.
I used file utility to make sure a 64-bit rootfs is being used here:
|
1 2 |
file /bin/dash /bin/dash: ELF 64-bit LSB shared object, ARM aarch64, version 1 (SYSV), dynamically linked, interpreter /lib/ld-linux-aarch64.so.1, for GNU/Linux 3.7.0, BuildID[sha1]=3633fbb61d3404a6128e851115663017f9c47efd, stripped |
Finally, there’s a bunch of modules pre-loaded on the board:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
linaro@linaro-alip:~$ lsmod Module Size Used by ctr 16384 1 ccm 20480 1 bnep 28672 2 bluetooth 606208 5 bnep arc4 16384 2 wcn36xx 77824 0 mac80211 749568 1 wcn36xx cfg80211 647168 1 mac80211 input_leds 16384 0 usbmouse 16384 0 usbkbd 16384 0 joydev 20480 0 hid_generic 16384 0 usbhid 61440 0 hid 131072 2 hid_generic,usbhid cpufreq_userspace 16384 0 cpufreq_powersave 16384 0 cpufreq_stats 16384 0 cpufreq_conservative 24576 0 evdev 24576 7 wcn36xx_platform 16384 0 ci_hdrc_msm 16384 0 ci_hdrc 49152 1 ci_hdrc_msm udc_core 28672 1 ci_hdrc qcom_spmi_temp_alarm 16384 0 snd_soc_msm8x16 77824 1 qcom_spmi_vadc 28672 0 rtc_pm8xxx 16384 0 industrialio 77824 2 qcom_spmi_temp_alarm,qcom_spmi_vadc ehci_msm 16384 0 msm_rng 16384 0 usb3503 16384 0 extcon_usb_gpio 16384 0 uio_pdrv_genirq 16384 0 gpio_keys 20480 0 uio 24576 1 uio_pdrv_genirq cpufreq_dt 20480 0 ipv6 462848 38 autofs4 49152 2 ext4 700416 1 mbcache 24576 1 ext4 jbd2 143360 1 ext4 btrfs 1204224 0 xor 20480 1 btrfs raid6_pq 106496 1 btrfs phy_msm_usb 36864 2 sdhci_msm 16384 0 sdhci_pltfm 16384 1 sdhci_msm |
Testing Debian on DragonBoard 410c
The thing that often do not work on ARM Linux board are 3D graphics and hardware video decoding, so I’ve specifically tested these two, and also played with the pre-installed Chromium browser.
If I understand correctly the debian image comes with Freedreno open source graphics driver, and if that’s the case I have the first ever platform with working open source 3D graphics drivers:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
linaro@linaro-alip:~$ es2gears EGL_VERSION = 1.4 (DRI2) vertex shader info: fragment shader info: info: 2250 frames in 5.0 seconds = 449.910 FPS 2193 frames in 5.0 seconds = 438.425 FPS linaro@linaro-alip:~$ es2gears_x11 EGL_VERSION = 1.4 (DRI2) vertex shader info: fragment shader info: info: 2236 frames in 5.0 seconds = 447.200 FPS 2193 frames in 5.0 seconds = 438.512 FPS |
So that means both framebuffer and X11 3D graphics acceleration are working. Nice !
I also tried to play Tuxracer as it was part of the board’s test results provided by Linaro.
|
1 |
sudo apt-get install extremetuxracer |
It works, but it’s so slow that it’s barely playable (see video below).
I installed VLC to play 1080op h.264 videos, but based on the CPU usage the system is clearly using software decoding, and there’s no audio via HDMI. I’ve asked about those two issues on the forums about 24 hours ago, but I have yet to get a reply.
Chromium loads OK, but I did notice some freezes during use, and YouTube will struggle at full screen at 1080p, in similar way to many other low end ARM Linux platforms.
DragonBoard 410c Linux Benchmarks
Let’s install the latest version of Phoronix…
|
1 2 3 |
sudo apt-get install php5-cli php5-gd wget http://phoronix-test-suite.com/releases/repo/pts.debian/files/phoronix-test-suite_6.2.1_all.deb sudo dpkg -i phoronix-test-suite_6.2.1_all.deb |
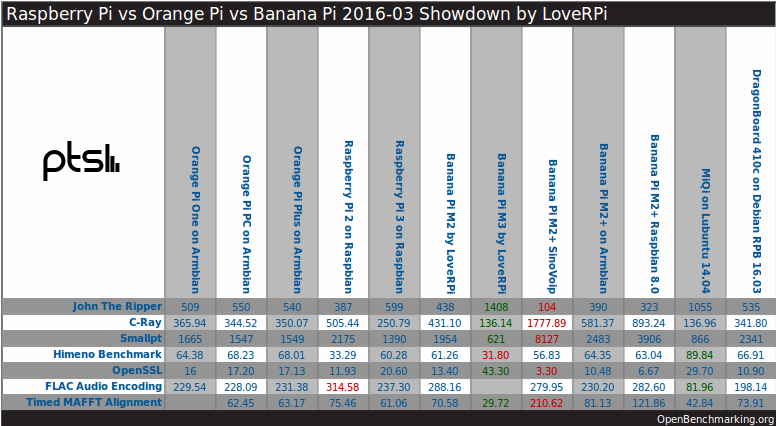
…and run some benchmarks to compare against other development boards:
|
1 |
phoronix-test-suite benchmark 1604204-GA-1604082GA37 |
After over 3 hours the results are in. Bear in mind that the board does not have heatsink, just a metallic shield, and this may affects the performance. It’s also running an OS with a 64-bit ARM rootfs, while platforms like Raspberry Pi 3 features a 64-bit processor running 32-bit code.
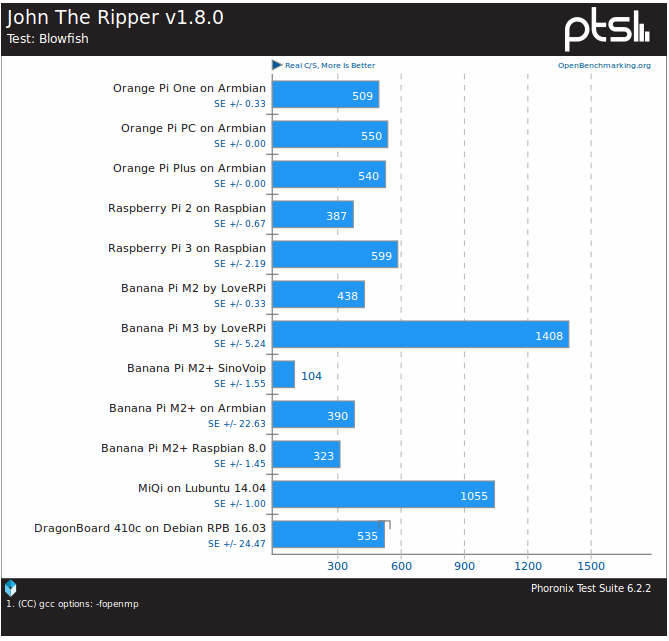
I like to check John the Ripper for multi-threaded performance.
 While FLAC audio encoding is nice to single threaded performance.
While FLAC audio encoding is nice to single threaded performance.
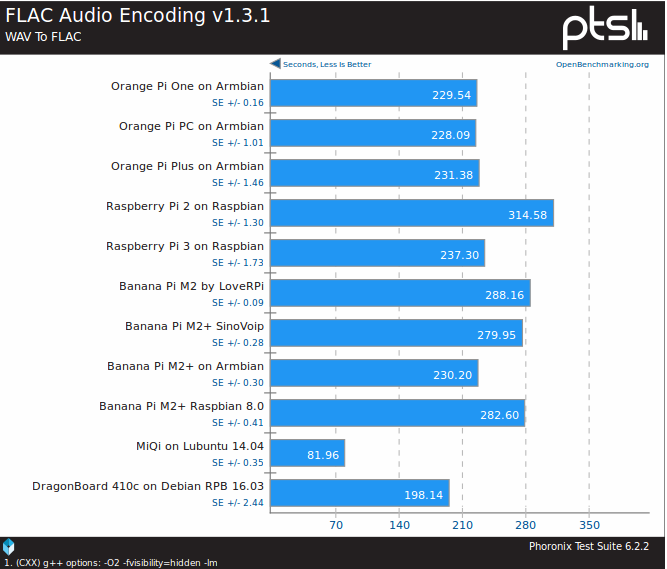
In theory the CPU performance of Snapdragon 410 and Broadcom BCM2837 (as found in RPi 3) should be equal since both are quad core Cortex A53 processors @ 1.2 GHz, but for some reasons DragonBoard 410c is a little slower in the multi-threaded benchmark, and quite faster during FLAC audio encoding likely due to software differences (Aarch64 vs Aarch32).
You can find the full results @ http://openbenchmarking.org/result/1605068-GA-1604204GA12

Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011.
Support CNX Software! Donate via cryptocurrencies, become a Patron on Patreon, or purchase goods on Amazon or Aliexpress


